为什么需要人机混合的智能控制
本文内容取自(missing reference)。
通俗来讲,一个控制系统往往通过某种控制手段使得动态系统对象的运行符合某既定要求。控制系统有三个关键组成部分:
- 控制的目标,比如稳定性、瞬态性能、其他各种优化指标等,任何控制系统总会有一定的目标要求,系统的运行应该满足这些给定的控制目标;
- 控制的方法,这包括控制系统的结构、控制的算法、控制的策略等,这是从事控制理论研究和控制工程设计的人所关注的核心点;
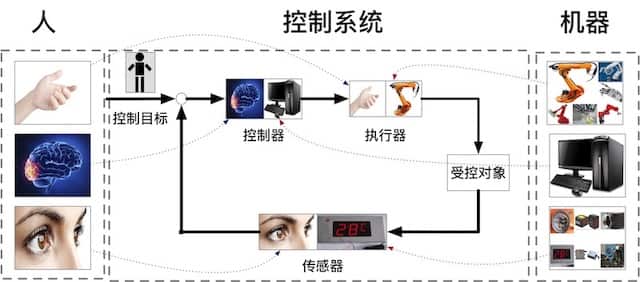
- 控制系统的物理构成,主要包含三个不同功能的组件,即,负责感知/测量系统运行状态或输出信息的传感器,负责运行控制算法的控制器,和负责实施控制策略的执行器,另外还有负责连接这些组件的通信链路等辅助组件,这是控制系统的外在形态。
控制系统物理构成的三个组件一般由各种各样的机器来充当。所谓“机器”,广义上是通过变换或传递能量、质量和信息,执行机械运动等达到特定目的的工具、装置或设备的总称。机器包括了种类繁多的温湿度、速度、体积、高度等各种物理量的测量器件,可以测量受控对象的状态/输出信息,从而充当控制系统的传感器;机器也包括了各种从嵌入式到大型的计算设备,可以进行控制算法的运行,从而充当控制系统的控制器;机器也当然包括了机械手、汽车油门、各种开关等执行部件,可以实施制订好的控制策略,从而充当控制系统的执行器。
人在控制系统中的作用,则一方面是控制系统目标的终极来源,因为任何系统的设计总是为人服务的,人是控制系统存在的原因,为控制系统设定目标,赋予价值。这一作用是机器所不具备的。另一方面,人也具有充当控制系统任意组件的能力。事实上,人的各种感觉器官如眼、鼻、舌、皮肤等具有感知各种相关物理量的能力,从而可以充当控制系统的传感器;人的大脑具有独特的智能,可以胜任控制系统的控制器;人的手、脚等也具有活动能力,也从而可以充当控制系统的执行器。
上面的讨论总结归纳为下图。从中可以看出,机器和人都可以充当控制系统的构成组件,而人更可以设定控制的目标。
很容易注意到,在现实中控制系统的物理构成往往仅包含各式各样的机器,并不包含人。如工厂里生产各种产品的自动流水线,中央空调的温度控制系统,自行火炮的射击过程,等等。在这些控制系统中,即便有人参与,往往不过是设定系统的控制目标,一旦目标确定,人便无需存在于控制系统的闭环中了。这意味着一般的控制系统并不需要人的密切参与。自然,人从控制系统中抽身而出符合技术发展的本意:只要有可能,控制系统应当全自动的完成所有任务,而不要求人的事必躬亲。
但是,人是不是真的可以从所有类型的控制系统中抽身而出呢?让我们思索如下的两个问题。
- 人的需求是否总可以离线设计?绝大多数控制系统都是事先确定好人的需求(反映为控制目标)后再进行系统设计,也即,人的需求在控制系统设计中是“离线”的。这种人的需求的离线设计对固定的或可以事先预测的需求自然不会有问题,比如温度控制,告知空调系统要设定的温度后,人便无需存在于温度控制系统中。但如果人的需求是持续变化不可预知的,将人的需求离线设计是否还可行呢?在这种情况下是否必须将人的因素显式的考虑在控制系统中?
- 人的加入是否可以超越单纯机器构成的控制系统? 假如单纯机器构成的控制系统的综合性能永远优于有人参与的,我们当然乐于让机器代劳所有的工作,但如果在一些场景下,人的某些特殊能力是任何机器都难以达到的,是否可以考虑将人的因素考虑进来,设计人机混合的更优的控制系统呢?
对上述两个问题的思考启发我们,在很多情况下显式的将人的影响和作用考虑到系统中来是有利的,甚至时不可缺少的。这成为我们考虑人机混合的智能控制的初衷。