人在回路控制
定义:“人在回路控制”是一种特殊的控制形式,其中人显式的存在于系统闭环回路中且不可简单剥离。
一个控制系统具有(一般由人设定的)控制目标,其物理构成则包含传感器、控制器和执行器等组件。人在控制系统中既可以行使设定控制目标的功能,又可能充当其中任一物理构成组件[1]。
从机器的自主性角度,人与控制系统回路的关系则有三种可能:一是控制系统的操控需要人的具体指令,此时人在闭环中(in-the-loop),人是整个系统中不可缺少的一个部分;二是系统目标由人给出,执行则由具有部分自主性的机器自行进行,此时“人在闭环上”(on-the-loop);第三则是机器可根据感知信息独立地确定目标并给出具体指令,无需人的介入,此时“人在闭环外”(out-of-the-loop)[2]。上述定义主要是从系统结构的角度考虑人在控制系统中的位置,大致包含了上述的“人在闭环中”和“人在闭环上”两种形式。
智能家居与智能可穿戴设备
智能家居设备和系统在近些年随着物联网、智能硬件等的迅速发展得到了大面积的普及。智能安防(指纹锁和云端监控等)、智能温控(Nest温控系统等)、智能灯光(光源联网、情境灯光等)等典型应用场景都有了很多成熟的产品。相信智能家居产品在未来会得到进一步的发展,使人们的生活越来越智能,越来越方便。但现有的智能家居产品与人的互动依然是极为简单的,在大多数情况下,智能家居产品的使用范式如下:人发出指令,智能家居产品自动执行指令,或者是,智能家居产品监测环境变化,自动执行一定操作。在这两种范式中,人都并不在智能家居系统的闭环回路中。
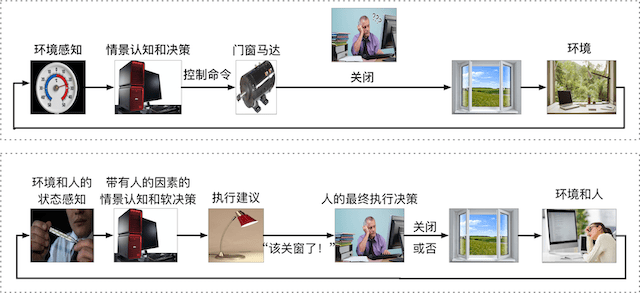
智能家居产品是直接为人服务的,其性能的好坏最重要的指标应该是人的主观感受,因此将人显式的置于智能家居系统的闭环中是很必要的。智能家居的人在回路至少在以下两个方面有用:一是利用对人的状态的观测和估计[3],使得智能家居产品的运行可以按照人的状态变化而变,比如随着人的情绪或工作状态而变的灯光系统;二是提供人的最终决断权,智能系统提供执行选项,而由人根据主观意图进行最终选择。这构成为具备情境感知的智能家居的基本框架。
类似于智能家居产品,智能可穿戴设备近些年也得到了爆发式的增长。大多数智能可穿戴设备本身仅仅是单个的设备,并不构成明显的控制闭环。如手环和智能手表可以测量佩戴者的步数,甚至检测较为复杂的运动形式,或提供在浅睡区叫醒的功能,但在所有这些功能中人的参与并不深入,主要是作为受控对象而存在,并不承担更主动的控制角色。
更广义上讲,各类康复机器人也都属可穿戴设备。比如霍金的轮椅,和用于辅助有困难的人行走的装置等[4]。现有的设备在智能化和人的参与上(主要是人的状态估计[5])仍存在比较大的发展空间。
人在回路自行车控制
利用可穿戴设备可设计较为复杂的控制系统。在[6]中,自行车骑手配备了一个测量心率的可穿戴设备,该设备实时进行心率测量,然后与设定心率相比,以此信号调整骑手的骑行功率。系统架构见下图。
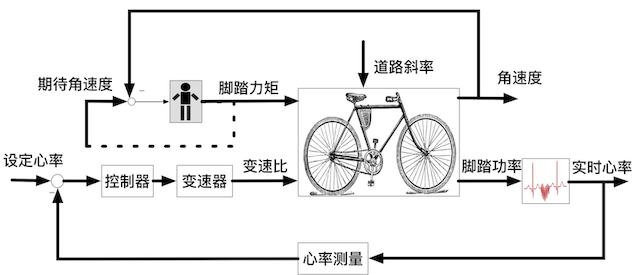
数学上,该系统可通过对自行车的车轮角速度$\omega_p$的动态变化、人的骑行效率和人的心率动态三者的描述而得到定量刻画。在本例中,人的心率、骑行功率等都深入构成为控制系统的一个组成部分,成为一个典型的人在回路的控制系统例子。与单纯机器构成的系统比较,人的心率和骑行功率变化等都具有很大的随意性,因而也就对控制系统的设计提出了不同于传统控制系统的挑战。
人在回路控制的关键
人在回路的控制系统大多具有以人为中心、机器是人的辅助的特点[7]。智能家居产品的首要目标是满足人对家居生活简单、轻松、自动的要求,可穿戴设备的首要目标是准确监测人的各项状态并提供合理建议,武器的最终控制权在人手中,霍金的轮椅以满足他的需要为唯一存在价值。人加入到控制系统的回路中,是因为只有这样人的需求才能得到更好的满足,而不是要辅助机器完成本该由机器完成的功能。
由于上述特点,人在回路控制中最为关键的问题就是对人的需求的准确理解和建模。唯其如此,控制系统的设计才能有的放矢。然而,最为困难的也是难以获取人的准确模型:人的感知、认知、目的、意图、决策等都有太大的随意性和难以量化的特点,很难用控制系统中熟悉的在数学上严格的微分方程、差分方程等工具描述。如何将人的准定量的、可能基于非严格的生理学和心理学的模型,与传统控制系统的严格数学模型有机合理的结合起来,是人在回路控制的关键问题。
参考文献
- [1]Y. Ding, M. Kim, S. Kuindersma, and C. J. Walsh, “Human-in-The-Loop Optimization of Hip Assistance with A Soft Exosuit During Walking,” Science Robotics, vol. 3, no. 15, p. eaar5438, Feb. 2018.
- [2]V. Boulanin and M. Verbruggen, “Mapping the Development of Autonomy in Weapon Systems,” Stockholm International Peace Research Institute (SIPRI), Nov. 2017.
- [3]M. Kim et al., “Human-in-The-Loop Bayesian Optimization of Wearable Device Parameters,” PLoS ONE, vol. 12, no. 9, pp. e0184054–15, Sept. 2017.
- [4]M. Corno, P. Giani, M. Tanelli, and S. M. Savaresi, “Human-in-the-Loop Bicycle Control via Active Heart Rate Regulation,” IEEE Transactions on Control Systems Technology, vol. 23, no. 3, pp. 1029–1040, Mar. 2015.
- [5]D. S. Sousa Nunes, P. Zhang, and J. Sa Silva, “A Survey on Human-in-the-Loop Applications Towards an Internet of All,” IEEE Commun. Surv. Tut., vol. 17, no. 2, pp. 944–965, Feb. 2015.
- [6]G. Grote, J. Weyer, and N. A. Stanton, “Beyond Human-Centred Automation – Concepts for Human–Machine Interaction in Multi-Layered Networks,” Ergonomics, vol. 57, no. 3, pp. 289–294, Mar. 2014.
- [7]K. A. Tahboub, “Intelligent Human-Machine Interaction Based on Dynamic Bayesian Networks Probabilistic Intention Recognition,” Journal of Intelligent and Robotic Systems, vol. 45, no. 1, pp. 31–52, Mar. 2006.