人机协同控制
本文内容取自(missing reference)。
定义:** “人机协同控制”是一种特殊的控制形式,通过人和机器在系统内的共同作用,取得单独人或机器无法达到的效果。
机器人外科手术
达芬奇外科手术系统是一套由人操控机器人进行微创手术的外科手术系统,可用于前列腺切除术、心脏瓣膜修复等手术过程。截止2012 年该手术机器人已进行了超过20万次手术。
在手术过程中,病人躺在特制的手术车中,外科医生则在独立的操作台上通过观看患处的3D 高清视频(经放大),操控手术车上的机械臂进行手术,见下图。

这一系统充分利用了外科医生的医疗知识(知道在何处进行何种操作)和3D高清视频系统对患处的放大及机械手在极小尺度下的精确度,达到了单纯人或机器都无法达到的效果:人很难在微创的极小尺度下精确操作,而机器人则难以判断如何进行手术[1]。
灌溉渠闸门人的操控
[2]考虑了一个人在灌溉渠的水位控制中起作用的例子。存在不同层级串联的多个灌溉渠,每个灌溉渠上有闸门可以调节出水量,这些闸门的开关程度必须由人来操作(或者因为闸门的开关没有智能化,或者因为需要保持人类的最终控制),开关程度(也需要由人来报告)决定了下游水位高低。人类操作员比闸门总数少,因此一个操作员需要在若干个闸门间走动并执行控制,系统结构见下图。
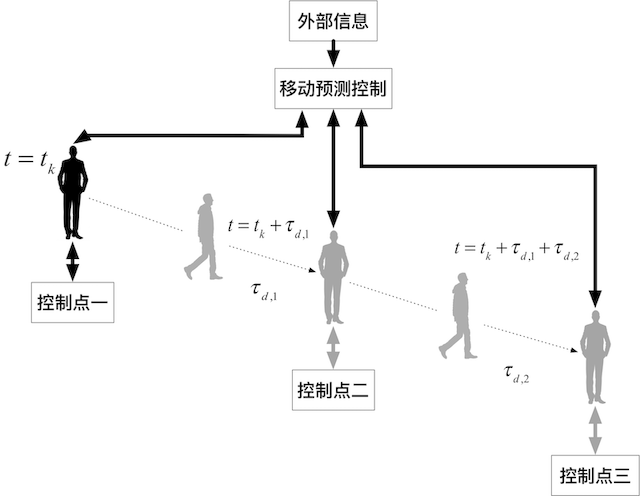
灌溉渠$i$的水位$h_i$ 的动态变化可由下式刻画: \(h_i(k+1) = h_i(k) + \frac{T_m}{c_i}(q_{i-1}(k-k_{di})-q_i(k) + d_i(k))\)
控制目标是使得灌溉渠水位$h_i$接近设定水位$h_{r,i}$,为此,需通过优化如下目标进行模型预测控制:
\[\min_{\Delta q_i(k:k+N_c), p_v^j}\sum_{l=0}^{N_p-1}\sum_{i=1}^N ((h_i(k+l)-h_{r,i})^T Q_i(h_i(k+l)-h_{r,i}) \\ +Q_{l,i}^T (h_i(k+l)-h_{r,i}) + \Delta q_i^T (k+l)R_i\Delta q_i(k+l))\]在常规模型预测控制中,求解的只是一串前向的预测控制量;在这里,除了闸门应该进行的操作 $q_i(l)$(即预测控制量),也包含了每个操作员 $j$ 进行操作的最优路径 $p_v^j$。这是全然不同于常规模型预测控制的地方。
不同于大多数人机协同控制的例子,在本例中人充当控制系统的传感器和执行器。仍然的,系统仅靠人或者机器无法运行:系统依赖人报告闸门开关和执行操作,但执行何种操作是人自身无法判断决策的,必须由拥有完整信息的中央处理机构运行控制算法才能得出。
人机混合智能控制
尽管在上例中人可以充当控制系统的传感器和执行器,但在大多数场景下,人最本质的优势还是人特有的智能,这种智能使得人在感知、认知和决策等方面优势突出。因此,人在人机协同中更多承担非执行方面的工作,这种突出人的智能优势的人机协同形成了所谓的“人机融合智能”。在这方面已经有了很多前驱性的工作。例如,依托赛博格的概念,有了脑机融合的混合智能(Cyborg Intelligence)[3], [4] 。在赛博格中人和机器的功能分野是清楚的:思考决策仅由生物体进行,机器只是增强身体机能。 如果我们将机器和生物体的大脑直接相连,即通过设计脑机接口,充分融合人的思考与机器算法、或生物智能和机器智能,以人机混和系统为载体,形成兼具生物智能体的环境感知、记忆、推理、学习能力和机器智能的新型智能,就成了脑机融合的混合智能[5]。另外,从模仿人脑功能的角度出发,也有基于认知计算的混合增强智能,定义为模仿人脑功能的新的软硬件,可提高计算机的感知、推理和决策能力。
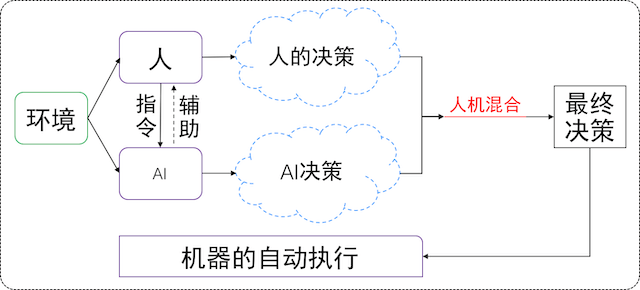
随着人工智能技术的迅速发展,可能会形成一种新型的自动化/人工智能/人的三层次人机协同框架。在技术发展上,我们已经有了基于控制理论和自动化技术的机器执行层面上物理/机械/电子等的自动化,使得机器具有自动执行具体指令的能力,能够根据给定的指令做出相应的行动。人工智能和大数据等技术则带来了环境感知和策略选择等方面的自主能力,使得机器能够识别周边环境进而自主选择合适策略,发出指令并经由机器的自动化完成最终目标。而人则往往负责最终目标的选择、设定和不确定情况下的临机决断等。这样,就形成了新型的自动化/人工智能/人的三层架构的人机协同控制,该架构见上图。
这种将人工智能深度融合其中的人机协同架构的发展面临着巨大的机遇和挑战。首先,以机器学习(深度学习为其典型代表)为基础的人工智能方法基于数据和算法对结果做概率估算,由于方法本身的概率性质和系统的复杂性,结果的不可解释、不可预测是其本质特征,使得其在机器自动化、人类控制之间进行有效融合变得非常困难。其次,机器自动化、人工智能驱动的自主性和人类控制三个不同层面和领域的定量描述程度有显著的差别:自动化领域一般可由严格数学方程描述(如微分/差分方程),人工智能领域一般可由较为严格的计算算法描述但缺少一定的数学精确性,而人类控制则更多依赖规则和直觉,缺少量化。如何对这三个领域使用统一可接受的描述语言成为一个基本困难。
尽管有种种困难,但可以想见的是,深度融合了人工智能技术的新型人机协同控制架构带来了未来智能控制发展的新范式,很有可能是未来智能控制发展的一条必由之路。
参考文献
- [1]N.-N. Zheng et al., “Hybrid-Augmented Intelligence: Collaboration and Cognition,” Frontiers of Information Technology & Electronic Engineering, vol. 18, no. 2, pp. 153–179, Feb. 2017.
- [2]M. F. Brown and A. A. Brown, “The Promise of Cyborg Intelligence,” Learning & Behavior, vol. 45, no. 1, pp. 5–6, Sept. 2016.
- [3]Z. Wu, Y. Pan, Q. Ye, and L. Kong, “The City Intelligence Quotient (City IQ) Evaluation System: Conception and Evaluation,” Engineering, vol. 2, no. 2, pp. 196–211, June 2016.
- [4]K. Liu, E. Fridman, and K. H. Johansson, “Networked Control with Stochastic Scheduling,” IEEE Transactions on Automatic Control, vol. 60, no. 11, pp. 3071–3076, 2015.
- [5]P. J. van Overloop, J. M. Maestre, A. D. Sadowska, E. F. Camacho, and B. De Schutter, “Human-in-the-Loop Model Predictive Control of an Irrigation Canal,” IEEE Control Systems magazine, vol. 35, no. 4, pp. 19–29, 2015.