具有光效抑制与细节保留的区域自适应低光照图像增强方法
论文相关信息
本文内容取自[1]。
研究背景及意义
低照度图像广泛存在于夜间监控、智能安防、自动驾驶以及煤矿等地下空间场景中。受光照不足、噪声增强和细节丢失等因素影响,直接获取的图像往往整体灰暗、对比度低、局部结构模糊,不仅影响人眼观感,也会显著降低目标检测、识别等下游任务的性能[2]。
传统方法如直方图均衡、Gamma 校正等通过简单像素映射提升亮度,但容易带来过度增强和颜色失真。Retinex 理论将图像分解为反射率和照明分量,从物理层面建模光照影响,LIME[3] 等方法在一定程度上改善了对比度,但在存在强光源或大范围非均匀光照时仍容易出现局部过曝与光晕伪影。
近年来,Zero-DCE、RUAS、Retinexformer 等深度学习方法在端到端低照度图像增强上取得了显著进展[4]。然而,在复杂场景(如煤矿井下)中,这类方法仍面临三方面挑战: 1)强点光源附近产生明显光晕和“发白”区域; 2)暗区域提升亮度的同时易放大噪声、损失纹理细节; 3)难以在保证效果的前提下兼顾模型复杂度与推理效率。
针对上述问题,本文提出一种区域自适应、同时兼顾光效抑制与细节保持的低照度图像增强框架,尤其适用于含强光源、非均匀照明的真实煤矿场景,在客观评价指标和视觉效果上均取得了优于现有方法的性能。
本文方法
区域自适应 Retinex 框架总体思路
本文方法以 Retinex 理论为基础,将输入低照度图像分解为反射率与照明成分,并通过区域分割—自适应照明增强—光效抑制三阶段协同优化照明图,再按 [ I_{\text{out}} = \frac{I_{\text{in}}}{S_2} ] 重建增强结果。整体流程如图1所示:
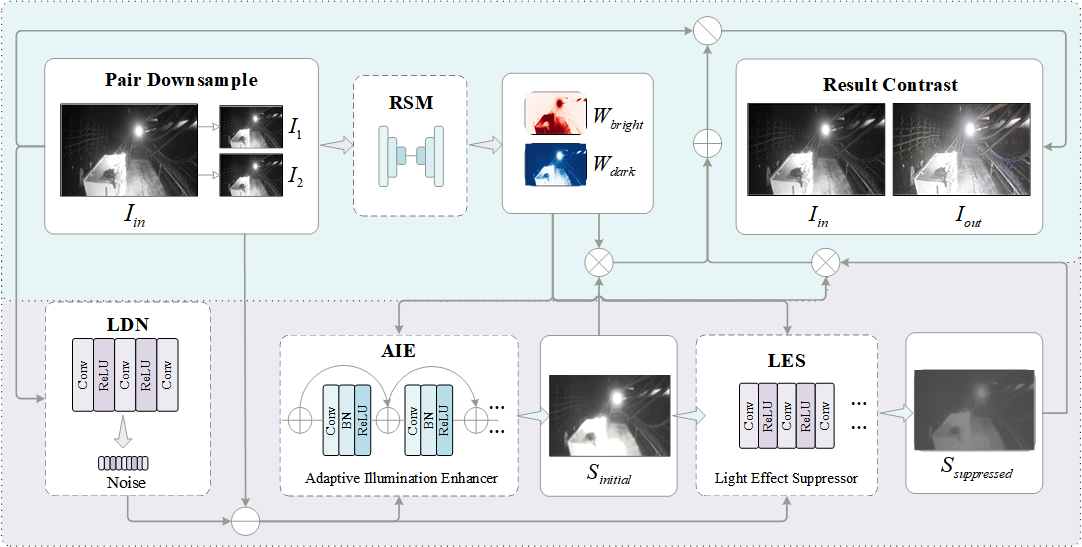
图1 区域自适应低照度图像增强总体框架示意
具体而言,方法包括以下关键模块:
-
轻量化去噪网络(LDN) 首先对输入图像进行预去噪,得到噪声抑制后的中间结果,为后续照明估计提供更干净的输入,同时通过无参考自监督损失约束去噪一致性。
-
区域分割模块(RSM) 将图像转换为灰度图,并根据阈值与 Sigmoid 函数生成平滑的暗区权重图 (W_\text{dark}) 和亮区权重图 (W_\text{bright}),再通过高斯平滑避免区域边界的突变。这为后续“分区增强 + 分区抑制”提供像素级软分配。
-
自适应照明增强模块(AIE) 对去噪后的特征进行暗区/亮区加权,分别通过共享残差块进行特征增强,再通过融合模块生成初始照明图 (S_{\text{initial}})。该过程重点提升暗区亮度,同时尽量保持亮区结构稳定。
-
光效抑制模块(LES) 将去噪图与初始照明拼接,通过编码网络与卷积注意力生成光效注意图,对亮区权重进行再次筛选,并生成像素级抑制因子 (F_{\text{suppress}}),从而得到抑制光晕与过曝后的照明图 (S_{\text{suppressed}})。最终用 [ S_2 = S_{\text{initial}} \odot W_\text{dark} + S_{\text{suppressed}} \odot W_\text{bright} ] 融合暗区与亮区照明,实现整体平衡。
复合损失与无监督训练策略
为在无配对数据条件下实现端到端训练,本文设计了包含多项约束的复合损失函数,主要包括:
- 区域自适应重建损失:在暗区鼓励照明显著提升,在亮区约束照明接近原始亮度,实现“该亮的亮、该稳的稳”;
- 结构一致性与高频细节损失:借鉴 SSIM 与拉普拉斯算子,对增强前后结构与高频纹理进行约束,避免结构扭曲与细节过度平滑;
- 照明平滑与区域边界平滑损失:对照明图施加总变分与边界平滑约束,减少块状伪影与区域交界处的不自然亮度突变;
- 去噪一致性损失:通过下采样多尺度约束 LDN 输出,使其在不同尺度上预测一致的噪声残差,提高去噪鲁棒性。
这一系列损失共同作用,使模型在提升暗区可见性、抑制亮区光效、保持细节与结构之间取得较好平衡。
实验结果
本文在 LOL-v2(Real 与 Synthetic)、LSRW(Huawei 与 Nikon)以及自建煤矿井下低照度数据集上进行了对比实验,基线方法包括 RUAS、SCI、ZeroDCE++、EnlightenGAN、NeRCo、Zero-IG 等代表性算法(missing reference)。
对比结果如图2所示,从客观指标看,在自建煤矿数据集上,本文方法相较次优方法在三项无参考质量指标上均取得提升:
- BRISQUE 提升约 3.26%;
- NIQE 提升约 0.24%;
- PIQE 提升约 11.22%。
在 LOL-v2、LSRW 公共数据集上,本文方法在大多数场景下获得最佳或次优表现,说明其在不同相机、不同场景下具有良好的泛化能力。
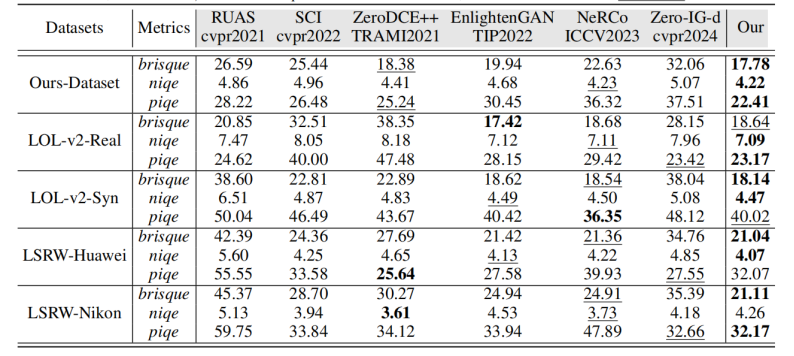
图2 不同数据集上不同方法的定量增强效果对比
从主观视觉效果看,如图3所示,相比 ZeroDCE++、Zero-IG 等方法,本文方法在含强点光源的煤矿场景中能够有效抑制灯光周围的光晕与“糊白”区域,同时显著提升暗区轨道、岩壁等结构的可见性,并保持整体色彩自然。

图3 不同方法在煤矿井下场景的可视化对比示意
此外,为了进一步展示在公开数据集上的定性效果,本文在 LOL-v2-Real 数据集上选取典型户外与室内低照度样例,如图4所示。可以看到,相比 ZeroDCE++、RUAS 等方法,本文方法在暗部区域能够恢复更多纹理细节(如墙面纹理、远处物体轮廓),同时避免了天空、高光区域的过度泛白与颜色失真,整体亮度分布更加均匀,视觉观感更自然,也更有利于后续检测与识别任务。
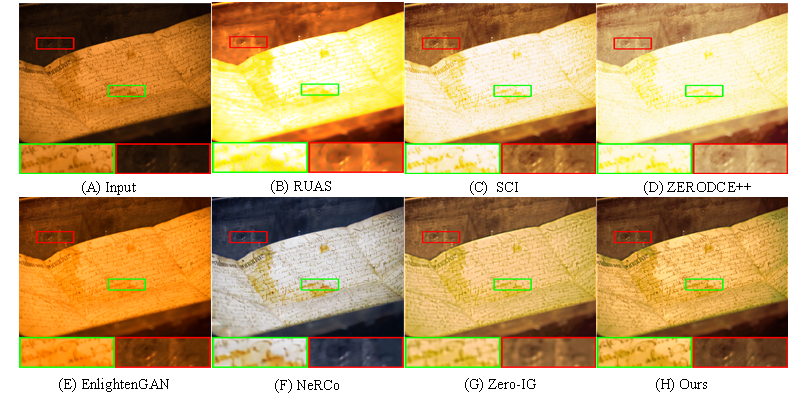
图4 不同方法在LOL-v2 数据集上的可视化对比示意
在复杂度方面,本文模型参数量约 0.156M、FLOPs 约 1.95G,单张图像推理时间约 17.8ms(RTX 4090 上),在接近 RUAS 这类极轻量方法推理速度的同时,显著提升了图像质量,为后续在煤矿安防、工业监控等场景中的实时部署提供了可能。
参考文献
- [1]L. Luo, W. Xie, X. Xia, Z. Li, and Y. Zhao, “Region-Adaptive Low-Light Image Enhancement with Light Effect Suppression and Detail Preservation,” in Pacific Graphics Conference Papers, Posters, and Demos, 2025.
- [2]P. Singh and A. K. Bhandari, “A Review on Computational Low-Light Image Enhancement Models: Challenges, Benchmarks, and Perspectives,” Archives of Computational Methods in Engineering, pp. 1–33, 2025.
- [3]J. Bai, Y. Yin, Q. He, Y. Li, and X. Zhang, “Retinexmamba: Retinex-based mamba for low-light image enhancement,” arXiv preprint arXiv:2405.03349, 2024.
- [4]S. Osher, M. Burger, D. Goldfarb, J. Xu, and W. Yin, “An iterative regularization method for total variation-based image restoration,” Multiscale Modeling & Simulation, vol. 4, no. 2, pp. 460–489, 2005.