网络化控制系统的通信发展视角
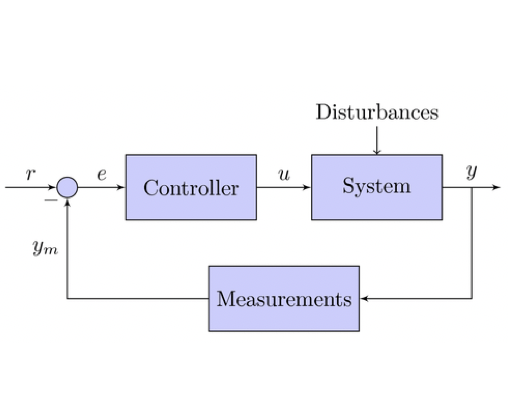
控制系统研究随时间变化的动态系统的动态行为,和外部输入以前馈、反馈等机制对系统动态行为的改造。控制系统典型的由受控对象、传感器、控制器、执行器等不同组件有机的构成为一个整体。各个组件之间需要互通信息才能够完成控制系统的整体目标。信息互通的通道典型的有两条单向路径:传感器到控制器的通道,将传感器采样的受控对象的运行状态传递给控制器;控制器到执行器的通道,将控制器的控制信号传递给执行器以操控受控对象的动态行为。
从控制系统中通信信道的演变角度来看,控制系统的形态经历了三个不同的阶段。在最早期,控制系统是小型化的、局部的,各个组件之间由专用和私有的信道直接相连。因为这种“私有专线”的特点,控制系统中的信息传输是完整的、几乎无延时的,因而也就没有必要考虑信道本身对控制系统的影响。
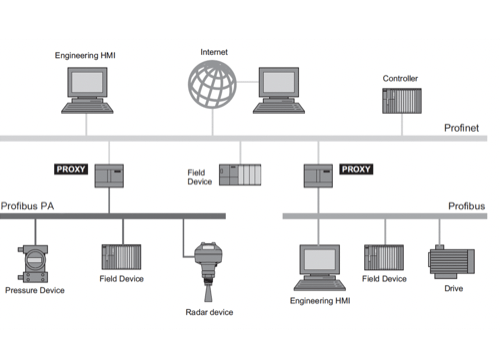
在第二阶段,控制系统开始变大、变复杂,一个系统中可以包含大量的传感、控制、执行组件,甚至可能由若干子系统构成。对这类系统,要在任意两个组件之间建立私有专线连接一方面成本太高,另一方面也使系统变得太过复杂,因此一种“总线”结构的通信信道在这类控制系统中开始大规模采用。其基本思想是建立一条骨干通信线路,然后所有的控制系统相关组件都连接到这条骨干线路上去,从而任意两个组件都可以通过这个骨干线路互通。可以看出,总线结构的通信信道仍然是控制系统私有的,但对每两个组件之间的通信来说,它并不是一条专线,而是需要跟其他的通信需求共享同一条信道,因此,其基本特点是”私有共享“ 。
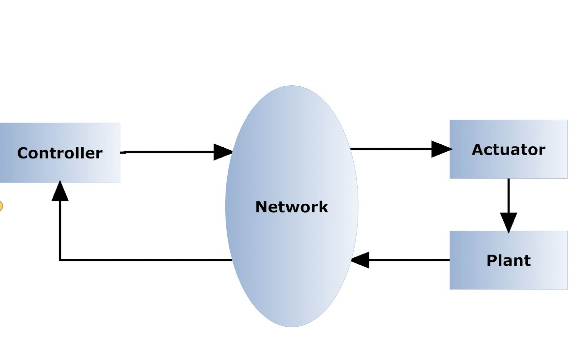
随着通信网络技术的飞速发展,公共网络(典型的是互联网)变得非常普遍,因此,如果能够利用公共网络作为控制系统的信息传输信道,控制系统就可以扩展到任何需要的规模。在这一基本想法的激励下,网络化控制系统技术发展起来,成为控制系统形态的第三个阶段。在这一阶段,控制系统中的信息传输经由公共通信网络进行,可以在很小的成本下将最大范围的控制组件联通在一起,极大的拓展了控制系统的适用范围,但这一阶段的通信信道的”公有共享“的特点,也造成了很大的技术困难,引发了近一二十年研究的一波热点[1], [2], [3], [4]。
参考文献
- [1]Y.-Y. Zhang, J.-L. Zhang, X.-Y. Luo, X.-Y. Luo, and X.-P. Guan, “Sensor/Actuator Faults Detection for Networked Control Systems via Predictive Control,” International Journal of Automation and Computing, vol. 10, no. 3, pp. 173–180, 2013.
- [2]V. Gupta and N. C. Martins, “On Stability in the Presence of Analog Erasure Channel Between the Controller and the Actuator,” vol. 55, no. 1, pp. 175–179, 2010.
- [3]J. Baillieul and P. J. Antsaklis, “Control and Communication Challenges in Networked Real-Time Systems,” Proceedings of the IEEE, vol. 95, no. 1, pp. 9–28, Jan. 2007.
- [4]J. P. Hespanha, P. Naghshtabrizi, and Y. Xu, “A Survey of Recent Results in Networked Control Systems,” Proceedings of the IEEE, vol. 95, no. 1, pp. 138–162, 2007.