考虑控制融合安全性的人机共驾系统共享控制策略
论文相关信息
本文内容取自[1]。
研究背景与意义
智能汽车作为智能交通系统的重要组成部分,可减少由人为因素引发的交通事故,提升道路安全和通行效率。但到目前为止,智能汽车的发展存在以下两个主要问题:其一,L3 级及以上的智能汽车短时间内无法突破技术瓶颈,安全性无法完全保证。其二,自动驾驶汽车面临伦理困境和法律法规的限制。在解决上述问题之前,人机共享控制作为一种能够充分发挥人类和自动驾驶汽车双方优势的技术,可以实现人机智能的混合增强,从而提高车辆行驶的安全性,并且能够提升舒适性、减少驾驶员工作负荷。 现有的针对人机共驾的研究多注重保证车辆的安全性。这种情况下,系统的其他性能(如跟踪性能)难以得到保障。大部分研究没有考虑在保证安全性的同时提升机器轨迹跟踪性能。因此,本文从保证系统安全性和提升轨迹性能的角度出发,设计了考虑控制量融合后系统安全性的共享轨迹跟踪策略,以在保证安全性的同时,提升系统的轨迹跟踪性能。
本文工作
本文提出了一种共享控制框架,框架包含上下两层。上层是权限分配层,根据车辆的安全情况和跟踪路径情况获取控制权限。下层是控制层,利用上层得到的控制权限进行人机控制融合,实现人机协同控制。如图1所示,框架的上层根据获取的信息进行权限分配,包含权限参考模块和权限优化模块。下层是共享控制模块。 系统工作流程如下: 1) 根据车辆状态(轨迹跟踪误差等)和环境信息,人类操作员与机器(轨迹跟踪器)提供各自的控制输入(转向角,加速度)。 2) 上层权限分配模块通过权限参考模块和权限优化模块给定人的控制权限。权限分配模块需要获取系统的状态、环境信息、人和机器的输入等信息。权限参考模块计算得出的参考权限作为参考输入提供给权限优化模块。权限优化模块考虑平滑性等因素对参考权限进行优化。权限参考模块和权限优化模块协同分配权限。 3) 下层共享控制模块通过将人与机器的输入按照权限加权求和得到最终的控制输入。

图1 共享控制系统框架
权限参考模块
权限参考模块给出一个时变的人类参考权限值,与轨迹跟踪误差和驾驶风险相关。随着轨迹跟踪误差的增加,参考权限增大。随着驾驶风险增加,参考权限减小。本文通过模糊推理方法构建轨迹跟踪误差、驾驶风险和人类参考权限之间的关系。 轨迹跟踪误差、障碍物距离和参考权限均采用三角形隶属度函数,采用5级模糊空间分割,从小到大的模糊集合名称分为:很小(VS),较小(S),中等(M),较大(B),很大(VB)。在制定推理规则时,安全性的优先级高于轨迹跟踪误差。当系统离障碍物的距离较小时,首先考虑安全性。最终的参考权限根据推理规则随着轨迹跟踪误差和障碍物距离的演化示意图如图2所示。

图2 参考权限演化示意图
权限优化模块
单一的权限参考模块输出的参考权限比较粗糙,并且没有考虑到权限变化的平滑性,性能较差。因此,引入权限优化模块在参考权限基础上考虑了平滑性因素得到精确的控制权限。利用一个MPC求解出权重 ,目标函数中包含所需考虑的因素,目标函数可以表示为:
\(J = \omega_1J_1 + \omega_2J_2 + \omega_3J_3\)
第一项是关于安全的代价函数项,第二项是关于路径跟踪性能的代价函数项。第三项是关于权限平滑性的代价函数项。约束条件包含对控制量和权限变化的最值的约束以及系统动力学约束。
最终的控制输入为:
\(u = \lambda u_h + (1-\lambda)u_a\)
实验结果
本文利用一个自行车模型车辆验证本文提出的权限分配方法的有效性。黑色正弦状曲线为参考路径,红色椭圆区域为障碍物。参考路径上存在障碍物。实验的目的是比较不同控制策略下的系统的避障和轨迹跟踪效果。期望的控制效果是保证系统在避开参考路径上障碍物的同时尽可能减小与参考路径间的跟踪误差。评估控制效果的指标主要有两个,一是是否能避开所有障碍物保证车辆安全,二是规划的路径与参考路径的误差。 实验证明,机器单独工作和本文设计的人机共享控制框架均可以保证车辆行驶的安全性,但人机共享控制下的平均跟踪误差比机器单独工作时减小。跟踪误差如下图所示:
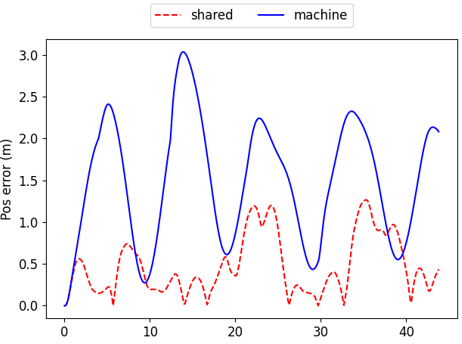
图3 跟踪误差
同时本文比较了所提动态权限共享控制方法和固定权限共享控制方法的控制效果。固定权限时,存在车辆与障碍物距离很近的情况,可能引发危险。本文设计的共享控制方法则不会出现这个问题,更加安全。因为当车辆与障碍物之间距离较小时,动态权限分配模块将会分配给人类较小的控制权限以保证安全。固定权限的共享控制方法平均轨迹跟踪误差为0.62775,本文设计的共享控制方法的平均轨迹跟踪误差为0.41241。固定权限时的平均跟踪误差大于本文的共享控制方法。出现这种情况的原因是,当车辆与障碍物之间的距离较大时,动态权限分配模块会分配人类较大的权限以保证良好的跟踪性能。而固定权限在安全性良好但跟踪性较差时,也不会提升人的权限以减少跟踪误差。