研究目标
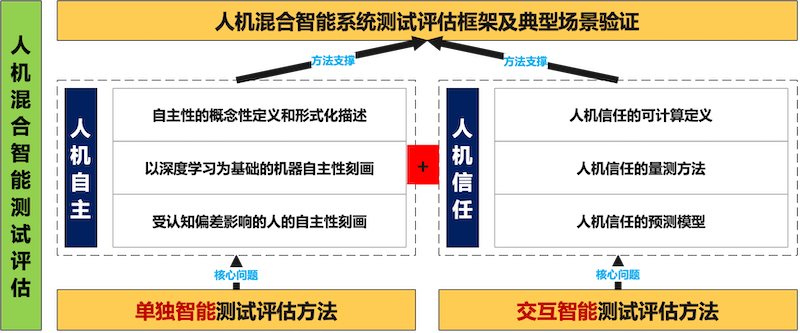
针对人机混合智能测试评估中理论基础缺失、技术方法缺乏和研究缺少一般性等短板和不足,开展单独智能”的人机自主评估和“交互智能”的人机信任评估理论、方法和技术研究,突破以“人机自主”为核心的、人机混合智能系统中人和机器“单独智能”测试评估方法和以“人机信任”为核心的、人机混合智能系统中人和机器“交互智能”测试评估方法,完成测试评估方法在以人机对抗为典型场景的仿真实验环境上的有效性和可行性验证,形成一套面向典型场景的人机混合双层智能测试评估方案。
主要研究内容
- 人机自主的一般性测量评估方法
- 人机信任的一般性测试评估方法
- 人机混合智能系统测试评估框架及典型场景验证
基本研究框架
相关阅读
研究成果
Journal Articles
-
Multisensor Contrast Neural Network for Remaining Useful Life Prediction of Rolling Bearings Under Scarce Labeled Data
Binkun Liu,
Zhenyi Xu,
Yu Kang,
Yang Cao,
and Yunbo Zhao
Front Inform Technol Electron Eng
2025
[Abs]
[doi]
[pdf]
Predicting remaining useful life (RUL) of bearings under scarce labeled data is significant for intelligent manufacturing. Current approaches typically encounter the challenge that different degradation stages have similar behaviors in multisensor scenarios. Given that cross-sensor similarity improves the discrimination of degradation features, we propose a multisensor contrast method for RUL prediction under scarce RUL-labeled data, in which we use cross-sensor similarity to mine multisensor similar representations that indicate machine health condition from rich unlabeled sensor data in a co-occurrence space. Specifically, we use ResNet18 to span the features of different sensors into the co-occurrence space. We then obtain multisensor similar representations of abundant unlabeled data through alternate contrast based on cross-sensor similarity in the co-occurrence space. The multisensor similar representations indicate the machine degradation stage. Finally, we focus on finetuning these similar representations to achieve RUL prediction with limited labeled sensor data. The proposed method is evaluated on a publicly available bearing dataset, and the results show that the mean absolute percentage error is reduced by at least 0.058, and the score is improved by at least 0.122 compared with those of state-of-the-art methods.
Book Chapters
-
Uncertainty-Based Dynamic Weighted Experience Replay for Human-in-the-Loop Deep Reinforcement Learning
Xia Tian,
Yu Kang,
Yunbo Zhao,
Yaqing Zhou,
and Pengfei Li
In Frontiers in Artificial Intelligence and Applications
2025
[Abs]
[doi]
[pdf]
Human-in-the-loop reinforcement learning (HIRL) enhances sampling efficiency in deep reinforcement learning by incorporating human expertise and experience into the training process. However, HIRL methods still heavily depend on expert guidance, which is a key factor limiting their further development and largescale application. In this paper, an uncertainty-based dynamic weighted experience replay approach (UDWER) is proposed to solve the above problem. Our approach enables the algorithm to detect decision uncertainty, triggering human intervention only when uncertainty exceeds a threshold. This reduces the need for continuous human supervision. Additionally, we design a dynamic experience replay mechanism that prioritizes machine self-exploration and human-guided samples with different weights based on decision uncertainty. We also provide a theoretical derivation and related discussion. Experiments in the Lunar Lander environment demonstrate improved sampling efficiency and reduced reliance on human guidance.
-
Trust-Modulated Authority Allocation in Human-Guided Goal Recognition Tasks
Ruiyu Xia,
Yunbo Zhao,
Junsen Lu,
Yang Wang,
Pengfei Li,
and Yu Kang
In Frontiers in Artificial Intelligence and Applications
2025
[Abs]
[doi]
[pdf]
In shared control teleoperation, the machine infers the humans’ goal to provide effective assistance, which we call human-guided goal recognition. However, current methods mainly use algorithm confidence to assign control authority during the process, which makes it difficult to correct machine inference errors under high confidence. To address this problem, we propose a trust model that considers machine capability fluctuations and human-machine interaction experience. We also add trust as a dynamic assessment of machine capabilities to authority allocation to improve the success rate of the tasks. Finally, we verify the effectiveness of the proposed method through experiments.
Theses
-
人机共驾中的共享型人类安全接管方法研究
谢祖浩
中国科学技术大学, 合肥
2025
[pdf]
-
基于人机信任的无人机竞速方法研究
陈少军
中国科学技术大学, 合肥
2024
[Abs]
[pdf]
无人机竞速技术在军事和民用领域展现出广泛应用潜力。在军事领域,无人 机竞速技术可以用于环境极速侦察、实施精准打击等;在民用领域,可以用于灾 难响应救援、工业管道检测等。因此,研究无人机的竞速方法具有重要意义。 竞速环境的复杂性给现有无人机竞速方法带来了挑战。一方面无人机在竞 速飞行中会遇到诸如湍流、阵风等不确定性因素,这种因素是突发、无征兆的, 难以通过概率模型进行建模;另一方面,在多机竞速飞行中,存在着诸如欺骗和 故意阻拦等高级博弈行为,这些行为因其复杂性而难以被精准定量描述。这些困 难会导致无人机自主决策出错,使得竞速效果显著下降。 人机混合决策在无人机竞速领域的应用备受关注,是解决上述挑战的潜在 方向。而人机混合有效决策高度依赖于良好的人机协作关系,否则会出现人类工 作负荷大、忽视机器错误决策等问题。考虑到人机信任起着协调人机协作的关 键作用,将人机信任融入人机混合决策为解决无人机竞速中的挑战提供了可能。 为此,论文提出了适用于无人机竞速场景的人机信任模型,基于该模型,设计了 单机场景和多机场景下的竞速策略。论文的主要研究工作分为以下三点:1)考虑到现有信任模型可解释性差、未能刻画竞速飞行高动态特点,提出 了机器性能驱动的人机信任模型,该模型能够促进人对机器的信任水平和机器 实际能力之间的匹配。首先给出了人机信任所具有的特征以及演化规律;其次, 引入机器当前表现作为机器性能的评估指标之一,构建机器性能驱动的人机信 任模型;最后设计了真实的人机交互实验用于验证所提模型。 (2)针对单机竞速场景中不确定性因素导致无人机竞速效果不佳的问题,提 出了基于人机信任的单机竞速共享控制策略,有效地改善了无人机竞速效果,同 时提升人类的容错率,降低人类工作量。首先设计用于检测人类失误的无人机轨 迹预测模块;其次构建基于人机信任的仲裁机制,实现人机权限的动态分配;最 后在实验平台上验证所提方法有效性。 (3)考虑到多机竞速场景中有着对于高级博弈行为的刻画和实时计算的需 求,提出了基于人机信任的多机竞速强化学习策略,该方法能够实时给出决策指 令,同时提升了机器对于博弈的理解和竞速效果。首先将人机信任作为训练奖励 融入到奖励塑造函数中;其次设计对手轨迹预测网络,增加机器对于对手的策略 理解;最后设计实验验证所提方法有效性。
Conference Articles
-
A Human-Machine Trust Model and Trust Calibration Method for Decision-Aid Systems
Xiaojun Zhu,
Lunfei Liang,
Junsen Lu,
Yun-Bo Zhao ,
and Yu Kang
In 2025 44th Chinese Control Conference (CCC)
2025
[Abs]
[doi]
[pdf]
With the development of AI technology, decision-aid systems are widely applied. The trust level between humans and decision aids has a great impact on the overall performance of the system. Current research on human-machine trust has deficiencies in trust modeling and trust calibration, especially lacking quantitative characterization of human trust levels. In response to this, this paper proposes a human-machine trust evaluation model and a transparency-based trust calibration method for decision-aid systems. Firstly, a dynamic evolution model of human-machine trust is constructed, with machine performance and past trust as influencing factors. Secondly, the meaning of trust calibration is elaborated, the impact of transparency on the trust model is analyzed, and a transparency-based trust calibration method is proposed. Through the simulation experiment of a tumor prediction medical assistance system, the rationality of the proposed trust model and the effectiveness of the calibration method are verified.
-
A Shared Control Strategy Considering Control Fusion Security for Human-Machine Co-Driving System
Xiaojun Zhu,
Bin Lan,
Wen Zhang,
Yun-Bo Zhao ,
Yu Kang,
and Binkun Liu
In 2025 44th Chinese Control Conference (CCC)
2025
[Abs]
[doi]
[pdf]
In human- machine cooperative control, it should be ensured that the system is safe and stable as well as efficient in accomplishing the task. Especially in safety critical systems, such as human-machine co-driving systems, ensuring safety is the first priority and other performances may need to be sacrificed to ensure safety. In this case, it is difficult to guarantee other performances of the human-machine co-driving system (e.g., tracking performance). Existing shared control methods cannot guarantee good tracking performance while keeping the system safe. To address this problem, this paper proposes a shared control strategy that takes security into account to ensure system security and stability while realizing good trajectory tracking performance. The effectiveness of the proposed strategy is verified in experiments. The results show that the proposed shared control strategy reduces the trajectory tracking error while ensuring safety.
-
An Authority Allocation Strategy for Shared Control in Human-Machine Cooperative Driving via Lane-Based Probabilistic Collision Risk Assessment
Xiuhua Liang,
Yunbo Zhao,
Yu Kang,
and Chang Xu
In 2024 14th Asian Control Conference (ASCC)
2024
[Abs]
[pdf]
An effective shared control strategy plays a crucial role in assisting drivers during hazardous situations in human-machine cooperative driving. This study introduces an author-ity allocation strategy for shared control based on collision risk assessment in a long-term maneuver. Initially, maneuvers are categorized by lanes, which can properly represent lane-based driving characteristics in real-world driving conditions. Subsequently, multiple lane models are built to combine with interactive multiple models to compute target lane probabilities. The target lane probabilities indicate the likelihood of a vehi-cle moving toward or remaining in each lane, determined by its lateral position in curvilinear coordinates. Finally, collision risk is evaluated through the integration of model probability distribution of lanes and artificial potential field value between a pair of predicted trajectories. Intuitively, the driver’s authority is directly correlated with the collision risk, so authorities between the driver and the machine are determined by the collision risk through a piecewise proportional function. The effectiveness of the proposed algorithm is verified using the Carla simulator in a cut-in scenario.
-
A Novel Haptic Takeover Method Based on Human-Machine Collaboration States
Yunbo Zhao,
Zuhao Xie,
Chang Xu,
Xiuhua Liang,
Ruiyu Xia,
and Jiayu Li
In 2024 14th Asian Control Conference (ASCC)
2024
[Abs]
[pdf]
The current stage of autonomous driving calls for drivers to remain actively engaged within the control loop in anticipation of the need for takeover operations. However, regaining control of the vehicle from a state of low situation awareness (SA) poses a challenge. To address this issue, this research introduces a novel takeover method based on haptic shared control, ensuring a smooth and safe takeover process. A symmetric softmax function is formulated to evaluate muscle state, taking into account the varying torque thresholds associated with different vehicle speeds, as well as utilizing the driver’s cognitive state to characterize their SA. Within the takeover process, a coordinator leverages the driver’s SA and human-machine intention similarity to determine the current state of human-machine collaboration. Subsequently, different control allocation strategies are then adopted for different states, and the driver is guided through force feedback. Experiment results demonstrate the effectiveness of the proposed method, showcasing its ability to facilitate a smooth and safe transfer of control, regardless of the presence of conflicts or the harmonious state existing between the human driver and the automated system.
patent
-
基于人机信任的车辆控制方法、设备、介质及程序产品
朱晓俊,
金骁然,
张忠政,
潘燕,
and 赵云波
2025
[Abs]
[pdf]
本申请公开了一种基于人机信任的车辆控制方法、设备、介质及程序产品,涉及智能驾驶技术领域,包括:根据获取到的当前车辆的实时超车数据,确定人机信任值;根据人机信任值,确定当前车辆的人类控制权重;基于获取到的人类控制指令、机器控制指令和人类控制权重,控制当前车辆行驶。本申请根据实时超车表现,动态调整当前车辆的自动驾驶系统的人类控制权重,避免了驾驶员突然全权接管车辆的缺陷,从而降低了通过人机混合系统控制车辆时发生交通事故的风险。
-
无人机轨迹规划方法、装置、设备以及存储介质
朱晓俊,
黄康杰,
张忠政,
潘燕,
and 赵云波
2024
[Abs]
[pdf]
本申请公开了一种无人机轨迹规划方法、装置、设备以及存储介质,涉及人机协同轨迹规划技术领域,该无人机轨迹规划方法包括:通过独轮车模型,将接收到的针对无人机的操作动作转换为输入基元;基于无人机的当前状态和输入基元,构建运动基元树,其中,运动基元树包括多个可行轨迹;根据输入基元,从可行轨迹中,确定无人机的目标轨迹。本申请通过对输入基元的充分利用,生成符合用户意图的目标轨迹,从而在无人机基于目标轨迹飞行的过程中,减少用户对轨迹的调整,从而降低用户的操作负担,提升无人机遥操作的效率。
-
车辆安全驾驶方法、装置、设备以及存储介质
朱晓俊,
甘毓雯,
张忠政,
潘燕,
and 赵云波
2024
[Abs]
[pdf]
本申请公开了一种车辆安全驾驶方法、装置、设备以及存储介质,涉及人机交互及强化学习技术领域,包括:根据获取到的车辆参数,确定周围车辆的行驶意图,其中,车辆参数包括周围车辆的车辆参数和操控车辆的车辆参数;根据车辆参数和行驶意图,应用训练后的神经网络,生成操控车辆的驾驶决策,并控制操控车辆根据驾驶决策行驶。本申请通过在生成驾驶决策时,考虑周围车辆的驾驶意图,改善无法预测人类驾驶行为的问题,降低了交通事故的发生概率。
项目人员
赵云波 东昊楠 卢峻森 周雅情 夏睿钰 张雯 欧阳晨 武昱泽 汪洋 王中月 甘毓雯 田霞 金骁然 黄康杰
项目合作