研究背景
网络化控制系统是系统的量测输出和控制输入等信号经由通信网络传输的一类控制系统;特别的,使用无线通信网络的称之为无线网络化控制系统。无线网络化控制系统在未来的智能自动化应用以至广义的下一 代信息技术的发展中占据着关键性位置,具有极为广泛的应用前景。首先,无线网络化控制系统提供了一种创新性的方式来连接和控制各种设备,带来了多种多样的智能自动化应用的可能性。其次,除了上述的无线网络化控制系统的直接应用外,无线网络化控制系统的研究也将为更广义的智能自动化应用提供理论和技术支持。
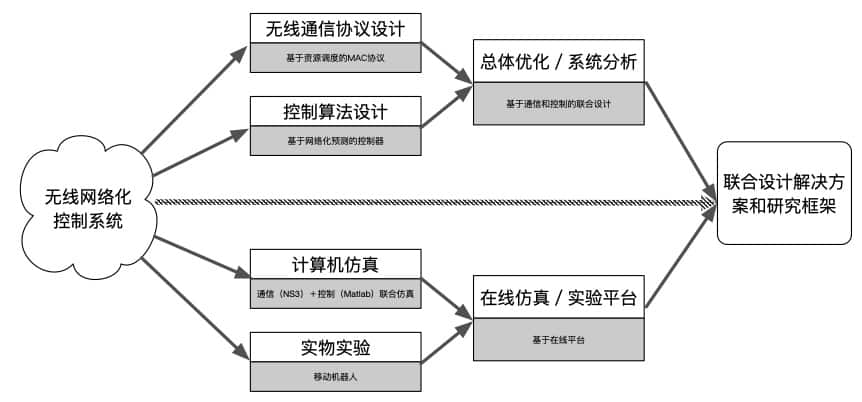
依托无线通信网络进行控制系统中相关数据传输的无线网络化控制系统研究的首要挑战就在于解决无线通信的非实时、不可靠的 现实和控制系统的实时、可靠的要求之间的矛盾。现有研究中存在的共同问题是无线网络化控制和通信二者的融合程度不够。本项目旨在为此系统研究面临的关键挑战提供一种可行的联合设计解决方案,这一 方案将采取基于调度的无线通信介质接入控制策略和 基于网络化预 测的控制器设计方法相结合的联合仿真和设计的研究思路。
研究目标
- 一套统一的无线网络化控制系统的联合设计方法
- 一套丰富的无线网络化控制系统的理论分析工具包
- 一个通用的无线网络化控制系统的在线联合仿真和实验平台
主要研究内容
- 无线网络化控制系统的数学建模
- 融合控制和通信因素的联合设计
- 整体系统的性能分析
- 在线联合仿真和实验平台建设
基本研究框架
相关阅读
研究成果
Theses
-
基于动态信道选择的无线网络化控制系统设计和分析
郝小梅
浙江工业大学, 浙江杭州
2022
[Abs]
[pdf]
近年来,无线网络化控制系统由于其低成本、高灵活、易维护等诸多优点 已成为学术研究的热点,相关成果被广泛应用于工业控制、智能家居、智能医 疗等领域。由于无线网络化控制系统中资源有限的通信网络在不同用户中进行 共享,若能在保证控制系统性能可靠的前提下节省无线网络化控制系统所用的 通信网络资源,将能有效优化共享通信网络的资源分配和共享用户的性能提 升,相关问题已经成为当前研究的热点问题之一。 本文研究无线网络化控制系统中的通信资源节省问题,提出了一种基于动 态信道选择的网络资源调度策略。该策略可实时预测控制系统的传输需求,进 而对数据传输信道进行动态选择,最终在保证控制系统性能的同时节省了大量 的网络信道资源。本文的主要工作如下: (1) 针对与其他用户共享通信网络的无扰无线网络化控制系统,设计了基于 估计器的动态信道选择策略,在保证无扰无线网络化控制系统性能的同时节省 了大量网络信道资源。该策略的实现由控制信号估计器、信道选择器和控制器 三部分完成,其中控制信号估计器通过已知数据估计出未知的执行器实际使用 数据,帮助进行信道选择。而信道选择器利用估计器得到的控制器实际使用数 据和当前最新状态进行信道选择。最后给出了闭环系统渐近稳定的充分条件并 通过数值仿真验证了策略的有效性。 (2) 针对与其他用户共享通信网络的有扰无线网络化控制系统,设计了改进 的基于估计器的动态信道选择策略,在保证有扰无线网络化控制系统性能的同 时节省了大量网络信道资源。该策略的实现同样由控制信号估计器、信道选择 器和控制器三部分完成,其中估计器的实现引入了有界递归的思想,保证了有 界扰动下估计控制信号误差有界。同样,给出了保证系统最终一致有界的充分 条件并通过数值仿真验证了策略的有效性。
-
室内移动机器人路径规划算法改进研究
吴芳
浙江工业大学, 浙江杭州
2022
[Abs]
[pdf]
室内移动机器人可在工业和家用等场景发挥物料搬运、服务陪伴等重要功能, 其技术发展受到了业界的广泛关注。与一般应用场景不同,室内环境通常意味着 人类用户非预期的出现及其无法事先精确获知的运动轨迹,如何在该情况下同时 保证算法的高效性和人类用户的安全成为现有路径规划算法所面临的重要挑战, 成为当前的研究热点之一。 本文针对室内环境研究并改进了移动机器人路径规划领域的两种重要基础 算法——动态窗口法和人工势场法,提升了室内环境下移动机器人规划路径的效 率和安全性。主要研究工作如下: (1)提出了基于全局规划的改进型动态窗口法,解决了室内环境下机器人 同时应对动静态障碍能力较弱、障碍附近目标不可达、可能陷入局部最优区域等 技术问题。具体研究工作包括:① 借助于 A*算法的全局路径规划能力,极大降 低了传统 DWA 算法陷入局部最优的可能性;② 设计了障碍物运动性质判断机 制实现分类避障,提升了算法同时应对动静态障碍的可靠性,确保了室内环境中 人类用户的安全;③ 改进了障碍项评价子函数,解决了算法存在的障碍附近目 标不可达问题。 (2)提出了基于采样的改进人工势场法,解决了该方法存在的局部极小值 问题和目标不可达问题,进一步结合障碍位置预测提升了室内环境中路径规划的 安全性。具体研究工作包括:① 提出了基于采样的改进人工势场法,通过采样 选择引力和斥力均相对较小的运动方向,解决了局部极小值问题;② 通过对机 器人-障碍物和机器人-目标之间的相对距离判断来完善采样机制,解决了障碍附 近目标不可达问题;③ 结合障碍位置预测,实现了更加安全的机械臂路径规划。 (3)设计了基于 TIAGo 机器人的指定地点桌面物品清理实验,进一步验证 了本文所提算法在实际环境中的可行性和避障路径规划的表现。相较于对比算法, 本文所提算法能够使得规划路径长度更短、距离障碍物更远、总运动时长也更短。 具体研究工作包括:① 构建了机器人任务环境地图;② 利用所提出的改进型动 态窗口法实现了高效安全的 TIAGo 底盘路径规划方法;③ 利用所提出的改进型 人工势场法实现了高效安全的 TIAGo 机械臂路径规划方法。
-
主动丢包的多包无线网络化控制系统的分析和设计
闫文晓
浙江工业大学, 浙江杭州
2022
[Abs]
[pdf]
随着无线通信、嵌入式计算和传感器网络等技术的快速发展,无线网络化 控制系统成为了近些年研究的热点。该类系统具有高灵活、易维护和低成本的 特点,在车联网、无人机编队等领域有广泛的应用价值。无线网络化控制系统 一个显著的特点是往往需要多个传感器采集并以无线方式传输相关数据,由于 通信网络中数据传输的不完美,这一特点引发了传统网络化控制系统不多见的 多包传输问题,需要新的方法加以解决。 本文研究多包无线网络化控制系统中的主动丢包问题,提出了一种基于预 测器的动态传输策略,该策略能够在几乎不增加无线网络信道资源占用的同时, 减少主动丢包给无线网络化控制系统带来的影响,提升系统的整体性能。具体 研究工作包括以下两个方面: (1) 针对无扰动情况下的多包无线网络化控制系统的主动丢包问题,设计了 基于优先级预测器的动态传输策略,减小了主动丢包的影响,提升了系统性能。 该策略包含优先级预测器、传输调节器和控制器三部分:优先级预测器每一时 刻预测下一时刻各传感器数据对系统稳定性的重要性,从而帮助传输调节器进 行决策;在此基础上,传输调节器设计合理的传感数据动态传输规则,降低高 优先级数据的退避时间,提高低优先级数据的退避时间;进一步设计了保证系 统稳定的控制器,并通过数值仿真验证了策略的有效性。 (2) 针对有外部扰动的多包无线网络化控制系统的主动丢包问题,改进了基 于优先级预测器的动态传输策略,使策略在有界扰动下能减少主动丢包的影响, 提高了策略的抗干扰能力。为了处理干扰,在前述 PBDT 基本设计之上,加入 了预测偏差估计器,根据历史图窗数据估计因外界扰动造成的预测器的预测偏 差,并可以检测系统的突变扰动对其进行补偿,保证策略的鲁棒性;进一步在 此改进的策略下给出了相应的 H∞控制器设计方法,并通过数值仿真验证了策略 的有效性。
-
基于通信特征估计的无线网络化控制系统设计和分析
梁启鹏
浙江工业大学, 杭州
2021
[Abs]
[pdf]
近年来,网络化控制系统由于低成本、高灵活、易维护等特点得到了广泛 的应用。如何解决延时、丢包等通讯限制依旧是网络化控制系统的重要研究方 向。无线网络拓扑灵活、易于受到攻击等特点使其通讯特征相较于有线网络更 为复杂,其中一个重要的表现为无线网络中详细的通讯特征,例如延时概率、 丢包率等难以提前得到。在此情形下的无线网络化控制系统的设计与分析具有 重要的理论和工程意义。 本文对网络通讯特征未知的无线网络化控制系统进行了控制器设计和系统 分析,提出了一种基于通讯特征估计的控制策略。与现有假设网络通讯特征已 知的研究相比,这种策略能在保证系统稳定性的前提下,以一种更为切实可行 的方式利用通讯特征。本文的主要工作包括以下两个方面: (1) 针对闭环延时满足分段马尔可夫过程的无线网络化控制系统, 设计了 基于延时估计的逼近控制策略。该策略包含延时概率估计器、逼近控制器和数 据包延时抖动检测器三部分,延时概率估计器利用在线测量的延时数据得到延 时概率估计,逼近控制器利用实时延时概率估计更新控制增益,在此基础上, 数据包延时抖动检测器使控制策略能自适应延时特性的变化。在设计的控制策 略下,得到了保证无扰控制系统随机稳定的充分条件。然后针对有扰的被控对 象,改造逼近控制器,并得到保证控制系统均方最终一致有界的充分条件。最 后通过数值仿真验证了控制策略的有效性。 (2) 针对丢包满足分段伯努利过程的无线网络化控制系统,提出了基于丢包 率估计的逼近控制策略。在原有策略的基础上设计了信道调度机制,用来平衡 系统性能和网络信道资源。同时为保证系统的稳定性,重新设计逼近控制器。 然后得到了保证闭环系统均方最终一致有界的充分条件和控制增益计算方法。 最后通过数值仿真验证了控制策略的有效性。
-
基于Scilab和ns-3的网络化控制系统联合仿真平台设计
卢帅领
浙江工业大学, 杭州
2021
[Abs]
[pdf]
基于控制与通信融合的联合仿真是网络化控制系统一种主要且具有独特优 势的仿真实验方式,在这种仿真方式中,由擅长于控制系统仿真的数学计算软件 仿真控制系统模块,由网络仿真软件仿真网络通信模块,之后将两个模块的仿真 融合,形成完整的网络化控制系统仿真。这样既实现对网络化控制系统分模块精 确仿真,又不破坏仿真实验的整体性,在网络化控制系统仿真实验中具有巨大的 优势。 然而,现有的网络化控制系统联合仿真平台大多基于 MATLAB 开发,这种 基于 MATLAB 搭建的仿真平台往往有难以深度定制功能、不能二次发布、高成 本、高版权风险和难以推广应用等缺点,也不符合国内开源生态发展的趋势。因 此,设计并开发一种开源免费的网络化控制系统联合仿真平台具有相当重要的现 实意义。 本文对网络化控制系统的仿真实验做了深入研究,分析了近年来网络化控制 系统仿真工具的发展,提出了一种基于开源免费软件的网络化控制系统联合仿真 平台,选取用于控制系统仿真的开源数学计算软件 Scilab 和开源网络仿真软件 ns-3 作为搭建网络化控制系统联合仿真平台的软件。本文的主要工作如下: (1) 设计了基于 Scilab 和 ns-3 的联合仿真平台总体架构和用于 Scilab 和 ns-3 软件间通信的联合仿真接口程序。联合仿真平台架构中确定了联合仿真平台的各 模块功能以及模块之间的通信方式,还规定了各功能模块运行的次序。联合仿真 接口程序连接 Scilab 和 ns-3 的程序接口,统一两个软件数据交换的格式,实现 Scilab 和 ns-3 仿真结果的交换与解析。 (2) 设计了用于同步 Scilab 和 ns-3 仿真时间的主从式周期同步机制。 根据 Scilab 和 ns-3 两种软件驱动方式的不同以及联合仿真对时间同步的需求,设计了 一种主从式周期同步机制用于协调 Scilab 和 ns-3 联合仿真的次序并同步两软件 的仿真时间,能够保证联合仿真平台的正常运行。 (3) 通过典型实例验证了联合仿真平台的可用性。一方面,通过仿真有损多 包传输的无线网络控制系统验证了联合仿真平台对多包传输的无线网络控制系 统的有效性,另一方面,通过与其他仿真方式的仿真实验结果对比,验证了联合 仿真平台的可靠性。
-
DoS攻击下无人水面艇的航向控制和故障检测研究
王岭人
浙江工业大学, 杭州
2021
[Abs]
[pdf]
近年来,无人水面艇在民用和军事领域广泛应用,主要原因在于无人水面 艇在某些危险和极端环境下易于部署和操作,执行不适合人员的危险任务。目 前我们通过无线网络和远程控制站控制无人水面艇的运动,将网络化控制系统 引入到无人水面艇中带来一些好处,如灵活性高、降低成本、易于维护,但同 时也存在一些问题,如网络诱导时延、网络攻击造成丢包、网络节点能量有限 等。另外,网络化无人水面艇系统可能会发生故障影响系统安全,因此及时检 测故障的发生非常重要。 本文针对网络化无人水面艇系统中的 DoS 攻击造成网络丢包和执行器发生 故障问题展开研究。一方面,无线链路本身具有不可靠性,网络化无人水面艇 控制系统存在网络时延且易受到 DoS 攻击影响,导致通信通道受阻,数据包无 法正常传输,从而影响无人水面艇系统的航向控制性能;另一方面,执行器发 生故障,降低无人水面艇系统可靠性,如若不能及时检测出故障则存在安全隐 患。因此针对这样更复杂的网络化无人水面艇系统,设计一种有效的航向控制 和故障检测方案具有现实意义。本文基于此提出了相应的故障检测滤波器和控 制器协同设计方法,主要工作包括以下两个方面: 1.针对 DoS 攻击下的网络化无人水面艇系统,提出了一种基于观测的故障 检测滤波器和控制器协同设计方法。考虑采样器到控制站之间的网络通道中的 网络时延和 DoS 攻击引起的数据包丢失,构建一个新的受风、浪等外部干扰和 执行器故障影响的网络化无人水面艇系统,并基于此提出一种基于观测的故障 检测滤波器和控制器协同设计方法,有效控制航向稳定,并及时检测故障的发 生和位置。另外,这些设计标准可以保证残差信号对执行器故障具有一定的敏 感性以及无人水面艇系统对外部干扰的鲁棒性。 2.针对网络节点能量受限和非周期 DoS 攻击下的网络化无人水面艇系统, 提出了一种基于自适应事件触发机制的故障检测滤波器和控制器协同设计方法。 在该方法中,考虑更现实的网络节点能量受限问题,基于此在采样器和控制站 之间的网络通道上设计自适应事件触发机制,动态更新触发阈值,有效减少触发次数,提高网络资源利用效率,同时保证在 DoS 攻击下无人水面艇系统的航 向控制稳定。
-
无界 DoS 攻击下网络化控制系统的防护设计
朱巧慧
浙江工业大学, 杭州
2021
[Abs]
[pdf]
由于开放、共享通信网络易于遭受攻击,安全问题已成为网络化控制系统 近些年关注的焦点之一,其中拒绝服务攻击(DoS)是最常见和易于实现的攻 击形式,得到了广泛的关注。现有研究大多假设 DoS 攻击在频率、持续时间或 其他指标上是有限的,这对现实通信系统是合理的;但对控制系统而言,只要 攻击强度超出了所能承受的界限,控制系统就会因为长时间开环而失稳,这意 味着对遭受 DoS 攻击的网络化控制系统而言,带有无界假设的 DoS 攻击具有重 要的现实意义,需要针对该类系统展开建模、分析和设计等研究。 在基于国内外研究的基础上,针对带有无界 DoS 攻击的网络化控制系统给 出了相应的解决方案,具体工作包括: (1)针对无界 DoS 攻击下的网络化控制系统,提出了一种多路径切换防护 策略。首先设计 DoS 攻击检测模块对当前路径进行攻击检测,然后设计多路径 切换模块进行路径的切换。进一步将全局均方渐近稳定的概念引入到闭环控制 系统中,得到了闭环系统的全局均方渐近稳定条件以及给出了闭环系统控制器 增益的设计方法。仿真结果证明了多路径切换防护策略有效降低了无界 DoS 攻 击对控制系统的影响。 (2)针对无界 DoS 攻击下受扰网络化控制系统,基于多路径切换防护策略, 得到了闭环系统的均方一致最终有界的稳定性条件,并进一步给出了控制器增 益设计方法。仿真结果证明了抗扰控制器设计方法具有更强的鲁棒性。
-
基于 TrueTime 的事件触发无线网络化控制系统设计与仿真
李信炜
2020
[Abs]
[pdf]
近年来,随着无线通讯技术、嵌入式计算和智能传感器的高速发展,控制系 统通过无线网络来实现传感器、执行器和控制器之间信息传输,形成了无线网络 控制系统。无线网络控制系统具有构建及维护成本低、易于布设及故障诊断、扩 展性和灵活性强,并且能够在恶劣甚至无法布线的环境中工作等优点,但同时也 存在网络时延和丢包、通信中断、抗干扰性差、功率有限等问题,所以无线网络 控制系统现已成为控制领域的研究热点之一。 本文的主要工作是针对无线网络控制系统存在的网络能量问题,设计事件触 发机制以及功率控制任务的方式进行优化,减少网络中控制节点的能量消耗。并 利用 TrueTime 工具箱对设计的方案进行仿真,验证了本文所提出的控制方法的 有效性。另外,通过对工具箱内网络参数的调节,得到了在该控制方法下系统稳 定的临界网络参数。本文主要工作如下: 1. 使用 MATLAB 的 Simulink 以及 TrueTime 工具箱对具有节点能量限制和 丢包问题的无线网络控制系统建立特定的仿真模型。 2. 基于 PID 控制算法,对本文所建立系统的控制器进行设计,并同时在传 感器/执行器节点和控制器节点中执行添加功率控制任务,以达到让系统节点以 尽量小的发射功率进行数据发送,从而减少控制节点能量消耗的目的。 3. 对传感器采用事件触发机制,在满足系统稳定的前提下,减少传感器节点 发送数据的次数,达到减少系统能量损耗的目的。 4. 对本文所建立系统中的无线网络模块的网络传输速率和丢包率进行调节, 以确定在本文提出的控制方法下系统稳定的临界网络参数,验证本文提出的控制 方法的有效性。
-
无线网络化控制系统的预测事件触发设计和分析
潘晓康
浙江工业大学, 杭州
2020
[Abs]
[pdf]
无线通讯技术和嵌入式计算技术在近些年的高速发展使得传统控制系统中 的有线通信逐步被无线通信所取代,形成了所谓的无线网络化控制系统。该类 系统具有低成本、高灵活、易实施等优点,为各类新型智能系统如物联网、车 联网、信息物理系统等提供了重要的理论基础模型,但同时无线通信所带来的 不可靠无线链路、多用户接入调度、有限节点能量等问题也给无线网络化控制 系统的设计和分析带来了全新的挑战, 对其研究和分析具有较大的理论和应用价 值。 本文针对无线网络化控制系统中的节点能量的有效利用和网络丢包问题展 开研究。 一方面 , 无线网络化控制系统的 网络节点通常使用电池代替线缆供 电,因此节点能量限制成为无线网络化控制系统的一个本质特点;另一方面, 无线通信就通信质量而言相比较有线通信更为不可靠,更为严重的数据丢包是 无线网络化控制系统设计中的一个重大挑战。面向上述问题,本文在节点能量 和丢包限制下研究有效的控制策略和系统分析方法。主要工作如下: 1. 面向受扰的无线网络化控制系统,提出了一种基于状态反馈的预测事件 触发控制,实现了网络丢包下系统性能和能耗消耗之间的平衡,方法在性能上 拥有较强的鲁棒性。其中,特别设计的触发阈值能够保证传感器端状态估计和 真实状态的差值始终小于某一边界;基于包的预测控制器能够动态补偿网络丢 包,保证系统性能。为该方法下的控制系统建立闭环模型,并得到了系统最终 一致有界的充分条件和对应控制器增益设计。 2. 面向状态不能直接测得的无线网络化控制系统,提出了基于观测的预测 事件触发控制方法 。 在该方法中, 基于状态观测的触发器能减少系统数据传 输,而基于观测反馈的前向预测控制器能动态补偿控制信号丢失。并且,在该 方法下得到的控制器增益和观测器增益在求解时是相互独立的,降低了计算时 的复杂性。
-
基于通信特性学习的网络化控制系统设计
汪楼龙
2020
[Abs]
[pdf]
网络控制系统是控制系统通过通信网络闭合的系统,控制系统的控制信号和反馈 信号都可以在通信网络中交换。 这种设计改善了传统控制系统效率, 扩大了控制规 模,也因此被大量应用在各种现代生活场合,但是通信网络带来的新问题对控制系统 性能造成严重影响,因此对通信特性进行研究对网络化控制系统设计有重要意义。而 对通信特性进行学习的优势在于将网络影响代入控制系统设计时注重了通信特性的动 态性的特点,可以更好的处理好网络带给控制系统的负面影响,从而达到系统性能优 化的目的。 本文的研究内容是基于通信特性学习的网络化控制系统设计,研究了网络系统的 动态变化通信特征,在考虑丢包率变化的情况设计最优控制策略,主要工作如下: 1. 叙述了论文的研究背景和意义,总结了网络化控制系统的通信特性处理的研 究现状。 2. 考虑通信特性的动态变化特点和丢包的随机性,对丢包问题进行建立伯努利 模型,然后基于贝叶斯统计推断设计了丢包率在线学习算法,得到动态的丢包率估计 值。 3. 将丢包看作动态变化的系统约束代入系统模型后,根据丢包学习算法的学习 结果将实时的丢包率传递给控制器,以此设计最优控制器。 4. 通过 MATLAB 仿真证明了丢包学习算法的有效性和控制系统性能优化的有效 性。
-
基于通信特征学习的网络化控制系统设计
许德衡
浙江工业大学, 杭州
2020
[Abs]
[pdf]
网络化控制系统是指 通过数字通信网络将分布在不同地理位置的传感器、控 制器和执行机构连接而形成的闭环控制系统。与传统控制 系统相比,网络化控制 系统由于网络带来了低成本、易维护和远程控制等优点,已经广泛应用于智能家 居、远程医疗、智能交通和工业自动化等领域。然而,数字通信网络 的非实时性 挑战了控制系统的实时性要求,对存在丢包、时延等通信约束的网络化控制系统 的设计和分析引起了广大学者的关注。 在以往的研究当中,无论是基于传统的控制算法来应对通信约束的 研究还是 通信与控制联合设计方法的研究,大多需要知道网络通信特征。对此通常 做法是 直接假设网络通信特征已知。但在一些网络环境复杂、通信特征易变化的 场景, 系统运行时实际的通信特征也是容易发生变化 的,且变化规律未知。所以在给定 丢包率或者时延值基础上设计的控制器往往不能满足控制系统实时性要求,甚至 由于网络状态的变化导致系统性能恶化甚至失稳。 本文研究了网络化控制系统中动态变化的网络通信特征,并在此基础上提出 了相应的最优控制策略和动态数据包打包方案的设计与分析。具体工作总结如下: (1)针对网络化控制系统中网络丢包特征存在动态变化的问题,提出了一种 丢包特征学习算法,并根据学习结果设计了最优控制器 ,解决了传统最优控制器 设计时需要事先假设丢包率已知的问题。首先 ,针对网络化控制系统中通信网络 存在的丢包问题建立初始伯努利模型,基于贝叶斯推断提出了一种学习当前网络 丢包模型的方法。然后,通过最新的丢包模型实时地估计网络的丢包率。继而, 根据实时的丢包率估计值进行最优控制器设计。最后,通过 MATLAB 数值仿真证 明本文基于丢包率特征学习的最优控制器在改善传统最优控制器系统性能改善方 面的有效性。 (2)针对共享网络下的网络化控制系统中网络时延特征存在动态变化的问 题,提出了一种时延特征学习算法,并根据学习结果设计了动态打包方 案,解决 了共享网络环境下控制系统消耗太多网络资源的问题。 首先,针对网络化控制系 统中存在丢包时延等问题进行了通信约束建 模,并基于第二章中介绍到的贝叶斯 推断方法提出了一种利用近期时延数据的模型学习、更新方案。然后,设计了一 种根据实时的通信特征模型的时延估计方法。继而考虑基于包的控制框架中网络资源有效利用的问题,利于对网络时延的实时估计设计出一种动态打包方案。最 后,通过 MATLAB 数值仿真来验证该方案在节约网络资源方面的有效性。
-
基于NS3和MATLAB的网络化控制系统协同仿真平台设计
顾慧卿
浙江工业大学, 杭州
2019
[Abs]
[pdf]
伴随着控制和通信技术的不断革新,网络化控制系统已经成为控制领域的研 究热点之一,通过仿真软件进行算法验证逐渐成为网络化控制系统研究的重要环 节。然而网络化控制系统是结合网络通信和控制两大特征的系统,传统的网络化 控制系统仿真工具对这类结合交叉领域的系统无法进行有效地精确仿真,这就需 要不同领域的仿真软件之间建立纽带,使不同的工具一起协同工作,各自负责系 统中各自专长的部分。因此,设计并开发网络化控制系统协同仿真平台具有相当 重要的现实意义。 本文深入分析了通信网络与控制系统仿真软件的特性,基于网络化控制系统 仿真平台的研究现状,选取了两种普遍使用的仿真软件,分别是能够胜任物理仿 真器的 MATLAB, 以及在网络通信领域近年来快速发展的 NS3 作为网络仿真器, 构建了一种新型的网络化控制系统仿真平台。本文的主要工作如下: (1) 设计了协同仿真平台的总体方案,确定了仿真平台依赖的各软件模块与 协同仿真架构的主导方式。以此设计了一个合适的系统架构,在该架构下两个软 件能够互相通信,同时也实现了单仿真器内部各模块之间的通信。 (2) 设计了仿真平台软件系统的时间同步方案。针对两种仿真软件间需要进 行时间同步的问题,根据仿真器驱动方式的不同和仿真目标的不同对两种可行的 同步方式予以实施,分别为控制器时间驱动采用的主从式时间同步方式,以及控 制器事件驱动采用的基于控制器事件的全局驱动式同步方式。 (3) 设计了仿真平台软件系统的底层模块实现方案。针对部分模块予以改进 并设计了新的模块,例如两种不同仿真器的时间控制模块。并使用 MATLAB GUI 套件开发了仿真平台交互界面以及将可视化功能加入系统。 (4) 通过使用该网络化控制系统协同仿真平台,对两种控制系统的主动补偿 方案进行测试。仿真结果验证了主动补偿方案的有效性,以及仿真平台具有较好 的可靠性与稳定性,符合仿真平台设计的基本要求。 最后,对本文的工作进行分析与总结,指出了仿真平台在设计方面的优点与 不足,并展望了未来的研究方向。
-
通讯和计算资源受限系统的控制设计和分析
韩康
浙江工业大学, 杭州
2019
[Abs]
[pdf]
通讯和计算技术的飞速变革使得控制系统的发展呈现出新的趋势,在此过程中涌现出 的大量新型系统,如物联网、信息物理融合系统等,都依赖复杂的通信网络和各种嵌入式 计算设备闭合控制系统。通信和计算技术的大量使用拓宽了控制系统的适用范围,但与此 同时通信与计算的各种限制也引入到控制系统中,使得对该类系统的设计和分析需要新想 法新思路。 本文研究了两类特殊通信和计算受限系统的设计和分析问题。针对特定场景下的通讯 和计算资源受限系统分别给出了问题的严格定义,提出了相应的解决方案并利用仿真实验 验证了方法的有效性。本文主要工作包括: 1. 研究了通信网络多包传输引发的多时延通信限制问题。无线通信技术的广泛使用 使得多个传感器采集系统信息的情况变得很普遍,但多传感器的使用造成了控制 系统输出由独立的多个数据包传输的情况,即“多包传输”,这引发了系统输出 各个部分时延不一致的问题,造成了设计的困难。对该问题给出了严格的数学定 义,在基于状态重建的基础上利用预测控制思想给出了一种基于数据包的主动补 偿方案,并分析了方案的闭环稳定性,最后分别使用纯数值仿真和基于 TrueTime 工具箱的仿真对方法的有效性进行了验证。 2. 研究了由于控制系统和其他组件共享有限计算资源而可能引起的控制系统计算资 源不足的计算资源受限问题,该问题在物联网等大规模使用共享嵌入式计算设备 的系统中较易出现。针对该问题提出了一种全资源预测控制方法,在不占用更多 系统计算资源的前提下优化了控制系统性能。对闭环系统的稳定性和方法的可扩 展性做了进一步的分析,并对方法的有效性基于 Matlab 仿真进行了验证。
-
基于IEEE 802.15.4的网络化控制系统的滤波与控制
何江涛
浙江工业大学, 杭州
2019
[Abs]
[pdf]
传统的控制系统依赖于有线来连接传感器、控制器和执行器等组件。随着无 线通信技术的发展,控制系统组件可以使用不同的无线网络来连接,形成了所谓 的无线网络化控制系统。无线网络化控制系统将控制、计算和无线通信三者融为 一体,具有低成本,易部署,能拓展,可远程等优点,在家居、工业、航天、农 业等诸多领域得到应用。然而,与有线通信相比无线通信的网络诱导时延、数据 包丢失和数据包时序错乱等通信限制更为明显,不仅影响控制系统性能,严重时 还可能导致控制系统不稳定;此外,无线通信还带来了能量效率、多包传输等新 的问题;这些问题受到众多研究者的关注。 作为一种具体的无线网络化控制系统,基于 IEEE 802.15.4 标准的网络化控制 系统值得特别关注。一方面,该标准被广泛应用于无线传感器、执行器网络中; 另一方面,该标准是广泛应用于物联网的 ZigBee 协议、广泛应用于工业自动化的 ISA100.11a 和 WirelessHART 协议的基础。 IEEE 802.15.4 标准是一种被定义来支持设备之间进行低成本、低数据率通信 的无线标准,通常这些设备由容量有限的电池供能,因此能量效率问题成为 IEEE 802.15.4 网络化控制系统中备受关注的问题。此外,IEEE 802.15.4 网络支持竞争信 道接入和混合信道接入。混合信道接入是 IEEE 802.15.4 的一大优势,如何利用这 一优势进行合理的资源调度是另一个值得关注的问题。本文对这些问题进行了研 究,得到如下成果: (1)针对 IEEE 802.15.4 竞争信道接入下网络化控制系统中滤波性能与能量效 率的权衡问题,提出一种基于传感器临界到达率的自适应 CSMA/CA 参数整定机 制。实现该机制的难点在于计算传感器的临界到达率。针对该难点,本文给出了 两种求解传感器临界到达率的新的线性矩阵不等式条件,避免了因传统线性矩阵 不等式条件的维数随传感器数量呈指数增长而难以计算各传感器临界到达率的问 题。这种基于临界到达率的自适应 CSMA/CA 参数整定机制在保证满意的滤波器 性能前提下提升了整个系统的能量效率。 (2)针对 IEEE 802.15.4 混合信道接入下网络化控制系统中系统性能(包括控制轨迹和系统寿命)与非竞争通信资源的权衡问题,设计了一种保守性更小的自 触发模型,并提出了一种基于增益调度器、网络调度器的新型控制结构。在该控 制结构下,只有系统的传感数据经过无线网络传输,一步传感数据用于计算多步 控制输入,网络调度器基于设计的混合调度算法完成资源调度。该控制结构在保 证满意的系统性能的前提下优化了对非竞争通信资源的利用效率。
-
多包传输网络化控制系统的设计和分析
黄涛
浙江工业大学, 杭州
2019
[Abs]
[pdf]
随着通信技术、控制理论和计算机技术的飞速发展,网络化控制系统在学 术界和工业界中引起了强烈地关注。网络化控制系统是通过通信网络将传感器、 控制器和执行器互联的控制系统。与传统控制系统相比,网络化控制系统有着 更低廉的布线成本、更灵活的配置和更便利的维护性等优点。目前随着先进技 术的发展和生产要求的提高,对多传感器通过通信网络独立传输数据并由控制 器处理分发控制信号的控制系统的需求越来越多。因此,如何对采用此通信方 式的网络化控制系统进行建模、分析和控制器设计是热点研究课题。 然而,利用此通信方式给网络化控制系统带来了许多不可避免的问题,例 如部分包丢失、多时延、传感器多采样率和通信信道竞争等,这些问题将会导 致控制系统的性能下降,甚至影响系统的稳定性。我们把这些问题统称为多包 传输问题,特别在无线网络化控制系统中,该问题是一个亟待解决的核心问题, 同时也是物联网、信息物理融合等系统中需要解决的重要问题。 本文在基于国内外研究现状的基础上针对多包传输网络化控制系统中的丢 包问题给出了相应的解决方案,具体的工作内容如下: (1) 针对网络化控制系统中存在由多包传输引入的部分包丢失问题,提出了 基于状态重构方法的状态反馈控制方案。首先采用状态重构方法对部分丢失信 息进行重构,进一步将随机稳定的概念引入到此闭环控制系统中,从而得出了 闭环控制系统的稳定性结论以及给出了闭环控制系统状态反馈控制器的设计方 法。 (2) 针对处于丢包情形下多包传输网络化控制系统的基于观测器的控制器设 计问题,提出了基于输出重构的观测器和控制器设计规则。首先采用输出重构 方法补偿多包传输网络化控制系统丢失的信息;进一步采用基于观测器的控制 规则来进行控制器的设计,得到闭环控制系统;然后证明了闭环控制系统的随 机稳定以及给出了相应的控制增益矩阵和观测增益矩阵的联合设计。(3) 针对 (1) 中的问题,该解决方案并没有考虑由于重构信息引入的系统误 差,对此提出一种基于重构信息的分类补偿控制规则。首先采用状态重构方法 来重构部分丢失信息,并对重构信息和接收到的信息分别设计反馈矩阵;进一 步得到闭环控制系统指数稳定的充分条件以及通过最小化衰减率来进行求解控 制器设计的约束条件,从而得到控制增益矩阵。 论文通过 MATLAB 软件和 TrueTime 工具箱对一些实例进行仿真研究,验 证所提出设计方法的有效性。最后,对全文进行了总结,并对下一步的研究进 行展望。
-
基于伪随机编码结构光的三维重建系统设计与实现
蒋传鹏
浙江工业大学, 杭州
2019
[Abs]
[pdf]
随着计算机视觉的不断发展,基于视觉的三维重建技术引起了学术界和产 业界的广泛关注,目前在三维检测、智能机器人视觉、3D 打印等领域有着广泛 的应用。基于伪随机编码结构光的三维重建在精度、实时性 、鲁棒性等方面都 具有一定的提升空间,因此对于该三维重建技术的研究具有重要意义。 本文针对近距离的物体 进行三维重建,从算法、软件和硬件三个方面对基 于伪随机编码结构光的三维重建系统进行分析与设计。该系统使用投影机主动 投射伪随机编码图案,双目相机获取图像后对物体进行三维重建 ;该系统的最 佳工作距离约为 350mm,帧率约为 15fps,三维重建的点间距的精细度范围是 0.2mm 到 3mm。本文的主要工作包括以下四个方面: (1) 研究了伪随机编码的生成方法,设计并生成了符合本文要求的伪随机编 码。本文设计的伪随机编码大小为320 × 147,由 7 个大小为320 × 21的伪随机 编码拼接而成。在大小为 320 × 21的伪随机编码区域中,任意5 × 5的区域具有 唯一性。采用多个伪随机编码图案拼接的方案使得 在极线搜索时保证图像块的 灰度值在该极线上具有唯一性的同时,降低伪随机编码的难度。 (2) 制作了高精度的标定板,多次标定双目相机提高标定精度。将反光标记 点贴在表面材质为漫反射的玻璃板上从而形成了高精度的标定板。基于 MFC 框 架开发了相机内参比较器软件,可直观比较前后两次相机标定结果的差异。 (3) 设计了一套三维重建的软硬件系统。该硬件系统由两个工业相机、 LED 补光灯和投影机等组成,具有轻巧、灵活、便携等特点。基于 MFC 框架开发的 软件系统,实现了相机标定、硬件调试、实时显示三维点云等功能,方便了三 维重建算法的验证。 (4) 本文的三维重建系统,改进了常规的三维重建算法,在精度、实时性和 稳定性方面都有显著提高。在立体匹配的过程中使用了基于伪随机编码图案、 图像金字塔和模板匹配等方法,提高了立体匹配时的精度和效率;利用双边滤 波的图像预处理方法,提升了三维重建算法的稳定性 ;在算法的实现过程中, 为了提升三维重建的实时性,采用了多线程和 GPU 加速方法。
-
基于网络化控制系统的协同设计算法研究
吴利男
2019
[Abs]
[pdf]
随着信息化技术的发展,在这个工业 4.0 的时代,网络化控制系统的研究与发展变 得日益重要。网络化控制系统中传感器,控制器和执行器之间的信息传输通常通过数据 通信网络进行,这使得网络化控制系统具有了高度灵活性,低成本和后期维护简单等优 点。而协同设计的优势在于将更多的网络影响(如网络资源限制、运行性能等)融入控 制系统设计和性能优化中,在设计控制系统的同时考虑网络实现的问题,从而使得系统 的总体性能优化,达到资源共享、快速协调沟通、不受时间空间限制的目的。因此,网 络化控制的协同算法设计以及如何处理网络诱导时延等问题成为网络化控制系统研究 的关键点,受到了广泛的关注。 本文的研究内容是基于网络化控制的协同设计算法研究,主要针对研究合适的网络 调度方案,了解现有的路由协议,同时从解决时延丢包两个角度设计控制算法。论文的 主要工作如下: 1. 查阅相关文献资料,综述课题研究背景与意义,介绍相关通信协议和调度算法 以及网络化控制系统的协同设计算法的研究现状,并详细说明现有关于解决 NCSs 中时 延和丢包问题的协同设计算法。 2. 基于模型依赖的平均驻留时间的切换系统的分析方法,本文针对具有时延和丢 包的网络化控制系统,采用增广矩阵的方法建立离散时间系统模型。 3. 针对系统进行状态稳定性分析,给出系统状态满足全局一致指数稳定的条件。 4. 设计系统状态反馈控制器及调度方案,定量描述系统指数衰减率和系统任意丢 包率的关系。 5. 利用 LMI 工具箱计算出状态反馈增益 K ,并通过对开环不稳定的控制对象进行 数值仿真以及与 LQR 方法进行对比,验证本文所提方法的有效性。
-
多径路由通信下网络化控制系统的协同设计与分析
姚俊毅
浙江工业大学, 杭州
2019
[Abs]
[pdf]
在网络化控制系统中,传感器、执行器和控制器分布在不同区域,并通过无 线网络形成相应的控制回路。其中,多径路由的传输方式在网络化控制系统中普 遍存在,但是,现有的研究中却较少涉及。事实上,多数数据通信网络均为多跳 网络,即从源节点到目的节点的数据传输需经过多个中继节点,而通信网络往往 采取动态的路由发现机制,这就使得从任一源节点到目的节点的传输路径不唯一, 即所谓“多径路由”。从通信网络角度看,多径路由对网络的负载均衡、路由可 靠性等方面有较大帮助。但是,多径路由的存在对网络化控制系统的设计和分析 带来了新的机遇和挑战。一方面,可以通过新颖的设计充分利用多径路由的特性 以提高网络化控制系统的数据传输效率,另一方面,对多径的调度、分配和优化 等也需要新的解决方法。 本文主要研究了多径路由通信下的网络化控制系统的协同设计问题。首先对 多径路由网络化控制系统进行建模,从兼顾控制系统稳定性和有利于网络整体环 境的角度出发,提出了多径路由调度算法和相关的控制器设计方法,不仅保证了 系统的稳定性,并在考虑实时网络情况的前提下,实现了网络的优化。本文严格 限制了网络的条件,未来将进一步放宽该限制,考虑在多径通信网络中使用竞争 机制来处理同时的通道访问请求或者使用基于状态的优先级来确定对网络的访 问顺序,从而可以得到更一般和普适的调度和控制协同设计算法。本文的主要工 作和成果如下: 1. 研究了基于多径路由的网络化控制系统时延补偿问题,提出了一种新的 多径路由随机时延建模方法。针对基于多径路由的网络化控制系统,对多径路由 中存在的时延和丢包进行建模,强调由长时延和多路径丢包所导致的数据包乱序 的影响,并将其建立成有限状态的 Markov 跳变系统的形式,然后采用基于包的 控制方法针对不同的执行器端时延的情况设计控制器。该方法不仅保证了系统的 稳定性,还实现了全局网络的负载平衡。最后使用纯数值仿真对方法的有效性和 优越性进行了验证。 2. 研究了基于多径路由传输引发的多时延切换问题 ,提出了一种新的网络 化控制系统的路径调度和控制协同设计方法。针对基于多径通信路由的网络化控 制系统的通信路径调度和控制器的协同设计问题,通过将不同通信路径切换所带来的时延变化建模为系统模态的切换,得到了所研究系统的切换系统模型,给出 了使得闭环系统指数稳定的通信路径调度所需满足的条件,并提出了满足系统稳 定和网络负载均衡的闭环通信路径调度方案和控制器设计方法。该方法不仅保证 了系统的指数稳定性,并在考虑实时网络情况的前提下,实现了系统的局部最优。 最后分别使用基于 MATLAB 的纯数值仿真和基于 LabVIEW 的虚拟仪器仿真对 算法进行了验证,结果表明了协同设计方法的有效性和优越性。
-
无线多跳网络控制系统中的调度与控制协同设计
袁征
浙江工业大学, 杭州
2019
[Abs]
[pdf]
网络化控制系统是将传感器、控制器和执行器通过通信网络相连构成闭环的 控制系统,凭借低成本、易安装、易拓展、易维护等优点受到广泛的欢迎。而无 线多跳网络控制系统是一种使用无线多跳网络进行信息通信的网络化控制系统。 无线多跳网络在部署上的限制更小、应用场景更广泛、容错性更强,用其构建的 网络化控制系统有着巨大潜力的应用前景,极具研究意义和实用价值。 多跳网络在为控制系统引入许多优点的同时,也带来了许多新的问题。网络 化控制系统中常见的时延和丢包问题在多跳网络中具有更复杂的形成原因,带来 更大的分析难度;多节点带来多通信路径可能造成多个系统通信时的路径冲突; 此外,节点能量有限,无法支持控制系统长时间高频次通信的需求。对于这些必 须考虑的新问题,传统的控制理论和处理方法或是无法适用,或是保守性太强, 这对无线多跳网络控制系统的设计与分析提出了新的挑战。 本文研究了无线多跳网络控制系统中的能量限制、数据误码、通信时延等问 题,对其提出了相应的设计思路和分析方法,并通过仿真验证了所提方法的有效 性。本文的主要工作成果如下: 1) 针对无线网络化控制系统中存在的能量限制问题,设计了功率感知事件 触发策略与功率优化方案,通过降低通信能耗达到了节能目的,随后分析并证明 了该设计下的闭环系统稳定性。通过数值仿真例子验证了方法的有效性。 2) 针对无线多跳网络控制系统中节点能量有限和通信时延问题,改进了传 统路由规则,在路径选择时兼顾能量与时延考量,同时针对无法忽略的通信时延, 设计了基于包的预测控制方法,保证了闭环系统的稳定性。通过仿真算例验证了 方法的有效性。 3) 针对多个网络化系统共享多跳网络时存在的节点能量有限、通信路径冲 突、时延分析困难等问题,通过建立多跳网络的数学模型明确描述了节点的工作 与各通信链路,确立了该网络中时延的计算方式;设计了两种不同侧重的调度算法来合理安排节点工作和通信链路,同时设计预测控制器以补偿调度无法消除的 通信延时;随后在稳定性分析中证明了闭环系统的稳定。最后,通过数值仿真表 明了上述设计的有效性。
-
基于多移动机器人的订单分拣系统设计
章鑫
2019
[Abs]
[pdf]
随着网购以及快递物流行业的兴起,大批量订单中的货物分拣已成为电商仓储物流 普遍现象,而如何进行高效的分拣也成为了关系到电商整体物流效率的首要难题。相比 于传统的人工分拣系统,自动分拣系统的产生虽然使分拣效率有了质的飞跃,但对其订 单处理策略效率问题,仍然有很多亟待解决。因此,针对电商仓储物流仓库具有的订单 电子化大批量、自动分拣、货物繁多、多货架存放的特点,本文利用移动机器人分拣订 单以及对订单进行合理分配以实现上述要求。 本文首先介绍了订单分拣的重要性以及电商物流仓库现有的分拣情况;其次,对 订单分拣中的主要问题进行了介绍,并对订单分拣问题的国内外研究现状进行了阐述, 分析了国内外研究趋势多元化的原因;然后在此基础上提出订单分拣相关改进算法,并 利用 Matlab 仿真平台进行实现,并和传统仓储模型进行仿真对比,最后,结合现有的 电商以及人工智能发展情况,对仓储物流的发展提出相应建议,并对其中订单分配和机 器人配送环节的合理性和有效性进行展望。 具体工作如下: 1. 基于新型物流仓储模型,提出了分别在两种不同模式下的订单分配算法 2. 将算法在 Matlab 中实现,并与已有的部分 MATLAB 仿真软件平台结合,完善 整体平台。 3. 将运用不同算法的新型仓储物流仿真平台与传统的仓储物流模型仿真平台进行对比。
-
基于全局视觉的多机器人定位方法研究
张林语
2018
[Abs]
[pdf]
各式各样的机器人已经被广泛应用在多个领域中,机器人的移动作为一个极 其重要的环节,涉及到了对机器人的定位。而无论是对单独的一个机器人,或是 多机器人进行定位,选择方法的效果将直接影响到最终的结果。 旨在更好地利用视觉信息来进行多机器人的定位,本文提出了一种基于全局 视觉的多机器人定位系统的设计方案。该定位系统在 MATLAB 上对固定于机器 人活动区域上方的摄像头采集到的视觉信息进行相关处理后,能够实现多个机器 人的定位,即输出每个机器人的二维坐标。 论文的主要工作如下: 1. 简述课题研究背景与意义及机器人定位方法的研究现状,介绍了一些定 位方法并分析各自优缺点。 2.建立一个基于 MATLAB 的开发环境上的视觉定位系统,对已有的几种检 测与跟踪算法进行介绍和性能验证,对比后选取合适的方法并加以改进。 3.将选择出来的检测和跟踪算法整合在一起,得到一种基于视觉的多目标跟 踪算法的设计方案,介绍基本流程加以实现。然后由质心计算确定每个目标在图 像坐标系中的二维坐标,根据透视原理确立转换关系,最终完成每个机器人的坐 标输出。
-
基于无人机飞控平台的算法研究
沈菲菲
2017
[Abs]
[pdf]
随着科技的进步与市场需求的发展,无人机从最初的军事用途已扩展到商业层面, 大家对于无人机的认知和需求都在逐渐提高,未来民用无人机必将保持较快的发展趋 势。如何控制无人机的飞行已成为研究无人机的一大热点,其中航迹规划技术作为无人 机自主航行的关键技术更是当下研究人员需要研究解决的问题。 本文的研究内容是基于无人机飞控平台的算法研究,针对无人机航迹规划方面, 利用人工势场法和 A*算法来实现对无人机飞行路径的规划,并在 MATLAB 上进行实验 的仿真验证。通过比较不同算法之间在航迹规划上的性能差异以及算法本身的优缺点, 来综合改进现有的算法,以达到更好的控制效果。论文的主要工作如下: 1. 综述论文研究背景与意义,以及无人机研究的国内外现状,介绍了无人机飞行 控制的主要技术问题。 2. 介绍人工势场法的基本原理,并根据算法的基本原理在 MATLAB 上进行仿真 验证。针对传统人工势场法在应用于无人机航迹规划中所存在的问题,提出了改进的方 法来优化算法,解决了算法无法适应复杂环境而陷入局部停滞不前的问题,并总结了在 算法中如何选取参数的方法。 3. 针对 A*算法,根据算法的基本原理在 MATLAB 上实现仿真验证,并在算法实 现中加入了伪彩色图,使规划的路径能够更直观地显示出来。 4. 比较两种算法的优缺点,并对所做的工作进行总结。
-
基于微小型机器人集群的协同控制研究
张求熠
2017
[Abs]
[pdf]
协同控制指的是在没有集中控制和全局通信的情况下,主要靠个体之间局部的通信 来实现各种集体行为。对协同控制的研究包括了对编队控制、群集运动、一致性控制等 基本问题的讨论。 本文以微小型机器人 Kilobot 为实验平台,针对编队控制和一致性控制的一些典型 算法进行研究,并将算法在该平台上实现。 论文的主要工作如下: 1.介绍模拟器 V-rep 和 Kilobot 实验平台,以及 Kilobot 所提供的一些主要的 API。 2.针对编队控制,选取了一种应用广泛的领导者-跟随法对该问题进行研究。结合 Kilobot 实物建立运动学模型。对于领导者,自定义合适的参数进行控制。对于跟随者, 选取了合适的控制律使其与领导者的相对位置和相对角度收敛到期望值,从而实现编队 控制。将该方法在模拟器上进行仿真验证其可行性。 3.针对一致性控制,选取了一种存在通信时延的一致性协议对该问题进行研究。基 于图论法,选取适当的参数和模型,对机器人的某一状态进行控制,使其达到该状态一 致。将方法在模拟器上仿真,并在 Kilobot 实物上实验,验证方法的可行性。
Journal Articles
-
Integrated Channel-Aware Scheduling and Packet-Based Predictive Control for Wireless Cloud Control Systems
Pengfei Li,
Yun-Bo Zhao ,
and Yu Kang
IEEE Trans. Cybern.
2022
[Abs]
[doi]
[pdf]
The scheduling and control of wireless cloud control systems involving multiple independent control systems and a centralized cloud computing platform are investigated. For such systems, the scheduling of the data transmission as well as some particular design of the controller can be equally important. From this observation, we propose a dual channel-aware scheduling strategy under the packet-based model predictive control framework, which integrates a decentralized channel-aware access strategy for each sensor, a centralized access strategy for the controllers, and a packet-based predictive controller to stabilize each control system. First, the decentralized scheduling strategy for each sensor is set in a noncooperative game framework and is then designed with asymptotical convergence. Then, the central scheduler for the controllers takes advantage of a prioritized threshold strategy, which outperforms a random one neglecting the information of the channel gains. Finally, we prove the stability for each system by constructing a new Lyapunov function, and further reveal the dependence of the control system stability on the prediction horizon and successful access probabilities of each sensor and controller. These theoretical results are successfully verified by numerical simulation.
-
A Novel Self-Triggered MPC Scheme for Constrained Input-Affine Nonlinear Systems
Pengfei Li,
Yu Kang,
Yun-Bo Zhao ,
and Tao Wang
IEEE Trans. Circuits Syst. II
2021
[Abs]
[doi]
[pdf]
This brief develops a novel self-triggered model predictive control algorithm based on time delay estimation for perturbed input-affine nonlinear systems. At each triggering instant, the algorithm determines simultaneously the predictive control sequence to feedforward compensate for the disturbance and the next triggering instant. As a consequence, the unnecessary samplings and transmissions are suppressed, and the frequency of solving the model predictive controller is reduced. The feasibility of the scheme as well as the associated stability are verified, with a numerical example illustrating the effectiveness of the proposed scheme.
-
Networked Dual-Mode Adaptive Horizon MPC for Constrained Nonlinear Systems
Pengfei Li,
Yu Kang,
Yun-Bo Zhao ,
and Tao Wang
IEEE Trans. Syst. Man Cybern, Syst.
2021
[Abs]
[doi]
[pdf]
This article investigates the predictive control scheme and related stability issue for a class of discrete-time perturbed nonlinear system with state and input constraints. First, we propose a novel control framework, i.e., networked dual-mode adaptive horizon model predictive control (MPC), which consists of a local controller, a remote controller that is subject to packet losses, and a judger coordinating the switchings between them. The optimization procedure of MPC with variable prediction horizon is implemented in the remote controller while a simple state-feedback control law is in the local one. Second, to establish the stability condition, we propose a new Lyapunov function. By specifying the relation between the Lyapunov function and the optimal MPC value function, the input-to-state practical stability is established. Finally, simulation results show the effectiveness of our proposed control scheme.
-
The Dynamics Characteristics of Flexible Spacecraft and Its Closed-Loop Stability with Passive Control
Bin Meng,
and Yun-Bo Zhao
J Syst Sci Complex
2021
[Abs]
[doi]
[pdf]
Passive control is the most popular methodology for flexible spacecraft while it remains an open problem whether the closed-loop performance can be achieved only with passive control subject to the coupling modes of rigid and flexibility. Also, the closed-loop performance of passive PD control based on the dynamics of the Euler angle parameterization of spacecraft, which has been widely used in practice, is yet to be addressed. Towards these challenges, by introducing the input-output exact linearization theory and Lyapunov theory, we show that the closed-loop performance for flexible spacecraft with rigid and flexible modes can be achieved by adjusting the parameters of the passive controllers sufficiently large. This is done by firstly transforming the flexible spacecraft dynamics into an exact feedback linearization standard form, and then analyzing the closed-loop performance of flexible spacecraft.
-
Robust Approximation-Based Event-Triggered MPC for Constrained Sampled-Data Systems
Tao Wang,
Yu Kang,
Pengfei Li,
Yun-Bo Zhao ,
and Peilong Yu
J Syst Sci Complex
2021
[Abs]
[doi]
[pdf]
In this paper, an approximation-based event-triggered model predictive control (AETMPC) strategy is proposed to implement event-triggered model predictive control for continuous-time constrained nonlinear systems under the digital platform. In our AETMPC strategy, both of the optimal control problem (OCP) and the triggering conditions are defined in discrete-time manner based on approximate discrete-time models, while the plant under control is continuous time. In doing so, sensing load is alleviated because the triggering condition does not need to be checked continuously, and the computation of the OCP is simpler since which is calculated in the discrete-time framework. Meanwhile, robust constraints are satisfied in continuous-time sense by taking inter-sampling behaviour into consideration, and a novel constraint tightening approach is presented accordingly. Furthermore, the feasibility the AETMPC strategy is analyzed and the associated stability of the overall system is established. Finally, this strategy is validated by a numerical example.
-
Construction and Analysis of Cortical–Muscular Functional Network Based on Eeg-Emg Coherence Using Wavelet Coherence
Xugang Xi,
Ziyang Sun,
Xian Hua,
Changmin Yuan,
Yun-Bo Zhao ,
Seyed M. Miran,
Zhizeng Luo,
and Zhong Lü
Neurocomputing
2021
[Abs]
[doi]
[pdf]
Research on the brain functional network is important in understanding the normal function of the brain and diagnosing neuropsychiatric diseases. Inspired by the brain functional network, we constructed a cortical–muscular functional network using electroencephalography and electromyography to explore the motion control mechanism of the central nervous system and understand the organization and coordination mechanisms of limb motion control. In the process of constructing the network, 12 signal acquisition channels were selected as nodes, and the wavelet coherence is used as the index of connection between network nodes. Based on the original network, we used a fixed weighted edge and threshold methods to remove weak weighted edges and compare the performance of the two methods. The experimental results showed that the constructed network had a higher clustering coefficient, and the smaller characteristic path length indicated a small-world characteristic. At the same time, the weighted characteristic path length and weighted clustering coefficient of the functional network simplified by the threshold method can show promising classification accuracy under Fisher and artificial neural network.
-
Simultaneous and Continuous Estimation of Joint Angles Based on Surface Electromyography State-Space Model
Xugang Xi,
Wenjun Jiang,
Xian Hua,
Huijiao Wang,
Chen Yang,
Yun-Bo Zhao ,
Seyed M. Miran,
and Zhizeng Luo
IEEE Sensors J.
2021
[Abs]
[doi]
[pdf]
Simultaneous and continuous joint angle estimation plays an important role in motion intention recognition and rehabilitation training. A surface electromyography (sEMG) state-space model is proposed to estimate simultaneous and continuous lower-limb-joint movements from sEMG signals in this paper. The model combines the forward dynamics with Hill-based muscle model (HMM), making the extended model capable of estimating the lower-limb-joint motion directly. sEMG features including root-mean-square and wavelet coefficients are then extracted to construct a measurement equation used to reduce system error and external disturbances. With the proposed model, unscented Kalman filter is used to estimate joint angle from sEMG signals. In the experiments, sEMG signals were recorded from ten subjects during muscle contraction involving three lower-limb-joint motions (knee-joint motion, ankle-joint motion, and simultaneous knee-ankle-joint motion). Comprehensive experiments are conducted on three motions and the results show that the mean root–mean–square error for knee-joint motion, ankle-joint motion, and simultaneous motion of the proposed model are 5.1143°, 5.2647°, and 6.3941°, respectively, and significant improvements are demonstrated compared with the traditional methods.
-
Model-Based Network Scheduling and Control for Systems Over the IEEE 802.15.4 Network
Yun-Bo Zhao ,
Deheng Xu,
Jiangtao He,
Xu-Gang Xi,
and Yu Kang
J Syst Sci Complex
2021
[Abs]
[doi]
[pdf]
The scheduling and control of a class of wireless networked control system is investigated, whose control loop is closed via a shared IEEE 802.15.4 wireless network. By using a gain scheduler within the packet-based control framework and fitting the delay-dependent gains into a time-delay system model, a less conservative self-triggered approach is proposed to determine the sampling update, which consequently enables the design of two network scheduling algorithms to reduce the communication usage. Numerical and TrueTime based examples illustrate the effectiveness of the proposed approach in the sense that it reduces greatly the communication usage while maintaining satisfactory control performance.
-
Predictive Event-Triggered Control for Disturbanced Wireless Networked Control Systems
Yun-Bo Zhao ,
Xiaokang Pan,
and Shiming Yu
J Syst Sci Complex
2021
[Abs]
[doi]
[pdf]
The control and scheduling for wireless networked control system with packet dropout and disturbance are investigated. A prediction based event triggered control is proposed to reduce data transmissions while preserving the robustness against external disturbance. First, a trigger threshold is especially designed to maintain the difference of the estimated and actual states below a proper boundary when system suffers from packet dropout. Then a predictive controller is designed to compensate for packet dropouts by utilizing the packet-based control approach. The sufficient conditions to ensure the closed-loop system being uniformly ultimately bounded are derived, with consequently the controller gain method. Numerical examples illustrate the effectiveness of the proposed approach.
-
Multi-Path Switching Protection for Networked Control Systems Under Unbounded DoS Attacks
Qiaohui Zhu,
Qipeng Liang,
Yu Kang,
and Yun-Bo Zhao
Journal of University of Science and Technology of China
2021
[Abs]
[doi]
[pdf]
The strategy design and closed-loop stability of networked control systems under unbounded denial of service (DoS) attacks are investigated. A multi-path switching protection strategy is firstly designed by noticing the usually available multiple paths in data communication networks. The strategy consists of a DoS attack detection module at the actuator side to identify DoS attacks from normal data packet dropouts, and a multi-path switching module at the sensor side to effectively switch the data transmission path when necessary. Then, the sufficient conditions for the closed-loop system being global mean square asymptotic stability are given, with a corresponding controller gain design method. Numerical examples illustrate the effectiveness of the proposed approach.
-
基于改进困难三元组损失的跨模态行人重识别框架
李灏,
唐敏,
林建武,
and 赵云波
计算机科学
2020
[Abs]
[doi]
[pdf]
为了提升跨模态行人重识别算法识别精度,提出了一种基于改进困难三元组损失特征学习框架。首先,改进了 传统困难三元组损失,使其转换为全局三元组损失。其次,基于跨模态行人重识别中存在模态间变化及模态内变化问 题,设计模态间三元组损失及模态内三元组损失配合全局三元组损失进行模型训练。在改进困难三元组损失基础上, 首次在跨模态行人重识别模型中设计属性特征来增加模型提取特征能力。最后,针对跨模态行人重识别中出现类别失 衡问题,首次引用Focal Loss 替代传统交叉熵损失进行模型训练。相比现有算法,在RegDB 数据集实验中,本文框 架在各项指标中均有1.9%-6.4%的提升。另外,通过消融实验也证明了三种方法均能提升模型特征提取能力。
-
Robust Model Predictive Control for Constrained Networked Nonlinear Systems: An Approximation-Based Approach
Tao Wang,
Yu Kang,
Pengfei Li,
Yun-Bo Zhao ,
and Peilong Yu
Neurocomputing
2020
[Abs]
[doi]
[pdf]
In this paper, a robust approximation-based model predictive control (RAMPC) scheme for the constrained networked control systems (NCSs) subject to external disturbances is proposed. At each sampling instant, the approximate discrete-time model (DTM) is utilized for solving the optimal control problem online, and the control input applied to continuous-time systems can then be determined. Such RAMPC scheme enables to implement MPC for the continuous-time systems in the digital environment, and meanwhile, achieves the state and control input constraints satisfaction in continuous-time sense. Furthermore, we also provide a guideline to determine the allowable sampling period. Sufficient conditions for the feasibility of the RAMPC scheme as well as the associated stability are developed. Finally, the effectiveness of the RAMPC scheme is shown through a numerical simulation.
-
基于无偏线性最优估计的PET图像重建
王宏霞,
徐英婕,
赵云波,
and 张文安
计算机科学
2020
[Abs]
[doi]
[pdf]
正电子发射断层成像( PositronEmissionTomo g ra p h y , PET ) 技术在实体肿瘤的定性诊断和病灶转移的检查中具有举 足轻重的作用,因此非常有必要提高 PET 的成像质量.然而,已有的迭代重建算法基本上都严重依赖于 PET 的线性模型.考 虑到探测器效率、探测系统的几何尺寸、生物组织对光子的衰减以及散射效应等诸多物理因素,该模型无法真实地刻画示踪剂 与正弦图数据之间的复杂关系.文中首先提出了一种新的观测模型,通过在原来的线性模型中引入未知输入项来刻画示踪剂 与正弦图数据之间的关系.该项由两部分组成: 1 ) 系数矩阵,用于进一步描述投影的线性部分; ) 未知输入,用于刻画示踪剂的 2 浓度分布和投影数据之间的一些非线性关系.在此新模型的基础上, PET 图像重构问题被转化成一个线性无偏的最优估计问 题.然后,给出了具有待定增益的线性迭代估计模型,通过将正弦数据向未知输入项的系数矩阵的零空间零域上进行投影,消 除了未知输入给线性最优估计带来的困难,借助卡尔曼滤波的设计思路,推导出了前述的估计增益.基于此估计模型,提出了 一种基于无偏线性最优估计的重建算法.最后,通过仿真实验,将所提重建算法与期望极大估计算法( Ex p ectationGMaximizaG 以及基于标准卡尔曼滤波( 的重 tionreconstruction , EM )、 核化的 EM 算法( Kernelmethod , KEM ) KalmanFilterin gm ethod , KF ) 建算法从均方误差( MeanS q uareError , MSE )、 信噪比( Si g nalGNoiseGRate , SNR ) 两个方面进行了比较.实验结果表明:与其他 3 种算法相比,所提算法重建的图像具有更大的信噪比、更小的均方误差,视觉上更加清晰,更好地重建了肿瘤的形状和尺寸, 因此具有更好的重构质量.
-
Enhanced EEG–EMG Coherence Analysis Based on Hand Movements
Xugang Xi,
Cunbin Ma,
Changmin Yuan,
Seyed M. Miran,
Xian Hua,
Yun-Bo Zhao ,
and Zhizeng Luo
Biomedical Signal Processing and Control
2020
[Abs]
[doi]
[pdf]
Electroencephalogram (EEG)–electromyogram (EMG) coherence analysis is an effective method for examining the functional connection between brain and muscles. An improved coherence approach is proposed in this study to enhance the estimation of EEG–EMG coherence. First, we sampled the synchronous EEG signal based on the burst points of the EMG signal. Then, a moving average of the sampled EEG by using a window function is performed before the EEG is sampled again on the basis of the EMG burst points. The EEG signals are reassembled to effectively reflect the muscle motions. Finally, the estimation of the EEG–EMG coherence is computed by using magnitude square coherence (MSC) and wavelet coherence. The coherence characteristics of the different autonomous movements in the -band and band are analyzed to verify the reliability of the method. Results show that our proposed method can remarkably enhance EEG–EMG coherence estimation regardless of using either MSC or wavelet coherence. The results of coherence analysis not only can correctly reflect the coupling relationship between the cortex and the muscles but can also distinguish the EEG–EMG coherences of the different autonomous movements.
-
Facial Expression Distribution Prediction Based on Surface Electromyography
Xugang Xi,
Yan Zhang,
Xian Hua,
Seyed M. Miran,
Yun-Bo Zhao ,
and Zhizeng Luo
Expert Systems with Applications
2020
[Abs]
[doi]
[pdf]
Facial expression recognition plays an important role in research on human-computer interaction. The common facial expressions are mixtures of six basic emotions: anger, disgust, fear, happiness, sadness, and surprise. The current study, however, focused on a single basic emotion on the basis of physiological signals. We proposed emotion distribution learning (EDL) based on surface electromyography (sEMG) for predicting the intensities of basic emotions. We recorded the sEMG signals from the depressor supercilii, zygomaticus major, frontalis medial, and depressor anguli oris muscles. Six features were extracted in the frequency, time, time-frequency, and entropy domains. Principal component analysis (PCA) was used to select the most representative features for prediction. The key idea of EDL is to learn a function that maps the PCA-selected features to the facial expression distributions such that the special description degrees of all basic emotions for an emotion can be learned by EDL. Simultaneously, Jeffrey’s divergence considered the relationship between different basic emotions. The performance of EDL was compared with that of multilabel learning based on PCA-selected features. Predicted results were measured by six indices, which could reflect the distance or similarity degree between distributions. We conducted an experiment on six different emotion distributions. Experimental results show that the EDL can predict the facial expression distribution more accurately than the other methods.
-
Feature Extraction of Surface Electromyography Based on Improved Small-World Leaky Echo State Network
Xu-Gang Xi,
Wenjun Jiang,
Seyed M Miran,
Xian Hua,
Yun-Bo Zhao ,
Chen Yang,
and Zhizeng Luo
Neural Computation
2020
[Abs]
[doi]
[pdf]
Surface electromyography (sEMG) is an electrophysiological reflection of skeletal muscle contractile activity that can directly reflect neuromuscular activity. It has been a matter of research to investigate feature extraction methods of sEMG signals. In this letter, we propose a feature extraction method of sEMG signals based on the improved small-world leaky echo state network (ISWLESN). The reservoir of leaky echo state network (LESN) is connected by a random network. First, we improved the reservoir of the echo state network (ESN) by these networks and used edge-added probability to improve these networks. That idea enhances the adaptability of the reservoir, the generalization ability, and the stability of ESN. Then we obtained the output weight of the network through training and used it as features. We recorded the sEMG signals during different activities: falling, walking, sitting, squatting, going upstairs, and going downstairs. Afterward, we extracted corresponding features by ISWLESN and used principal component analysis for dimension reduction. At the end, scatter plot, the class separability index, and the Davies-Bouldin index were used to assess the performance of features. The results showed that the ISWLESN clustering performance was better than those of LESN and ESN. By support vector machine, it was also revealed that the performance of ISWLESN for classifying the activities was better than those of ESN and LESN.
-
sEMG-MMG State-Space Model for the Continuous Estimation of Multijoint Angle
Xu-Gang Xi,
Chen Yang,
Seyed M Miran,
Yun-Bo Zhao ,
Shuliang Lin,
and Zhizeng Luo
Complexity
2020
[Abs]
[doi]
[pdf]
Continuous joint angle estimation plays an important role in motion intention recognition and rehabilitation training. In this study, a surface electromyography- (sEMG-) mechanomyography (MMG) state-space model is proposed to estimate continuous multijoint movements from sEMG and MMG signals accurately. The model combines forward dynamics with a Hill-based muscle model that estimates joint torque only in a nonfeedback form, making the extended model capable of predicting the multijoint motion directly. The sEMG and MMG features, including the Wilson amplitude and permutation entropy, are then extracted to construct a measurement equation to reduce system error and external disturbances. Using the proposed model, a closed-loop prediction-correction approach, unscented particle filtering, is used to estimate the joint angle from sEMG and MMG signals. Comprehensive experiments are conducted on the human elbow and shoulder joint, and remarkable improvements are demonstrated compared with conventional methods.
-
大批量订单整体分拣问题建模及其分布式并行方法
赵云波,
李天舒,
and 汪钰皓
高技术通讯
2020
[Abs]
[pdf]
对大批量订单中的货物进行高效整体分拣是影响大型电商整体物流效率的一个关键因素,但这一问题尚缺少严格模型和有效解决方法。本文通过对订单分拣系统的静态状态和动态演化进行数学刻画,并对订单分拣算法、系统限制条件和分拣效率等进行严格定义和区分,建立了大批量订单整体分拣问题的数学模型。在此基础上,利用智能货架思想提出了一种大批量订单的分布式并行整体分拣方法,有效解决了在订单整体分拣问题中的打包点数量瓶颈问题,解决了所提出方法的关键技术难点,并在数值仿真下证明了该方法的有效性。
-
无线网络化控制系统的功率感知事件触发策略及其闭环稳定性
赵云波,
袁征,
and 朱创
控制理论与应用
2020
[Abs]
[doi]
[pdf]
研究了能量受限无线网络化控制系统的设计和分析问题. 首先建立了无线网络化控制系统中数据误码率 和丢包率的定量关系, 进而设计了基于事件触发策略和功率优化机制的智能控制器. 在随机稳定框架下给出了相 应闭环系统稳定的充分性条件. 数值例子证明了所提出方法的有效性.
-
FVC: A Novel Non-Magnetic Compass
Wenjun Lv,
Yu Kang,
and Yun-Bo Zhao
IEEE Transactions on Industrial Electronics
2019
[Abs]
[doi]
[pdf]
The accurate orientation measurement in re- al time contributes significantly to the control of mobile robots, and further assists them to realize some funda- mental functions like automatic pilot, cargo delivery, target tracking, etc. The traditional magnetic compass has been denounced for its susceptibility to ferrous or electric ma- terials, vehicular motion, and latitude variation. Hence, in this paper, we aim at proposing a novel non-magnetic com- pass named floor visual compass (FVC) for mobile robots working in indoor scenarios, which is mainly implemented by a downward-looking monocular camera. With previously laid auxiliary strips on the floor, which are parallel to the reference axis, the FVC is able to estimation the robot’s orientation by means of image processing technologies and interval arithmetics. Considering the computational complexity of the visual orientation measurement, an event trigger for FVC is designed, to reduce the frequency of the correction operation using the visual orientation measure- ment. The real-world experiment verifies the effectiveness of the proposed non-magnetic compass.
-
计算受限控制系统的一种全资源预测控制方法
马翠芹,
赵云波,
姚俊毅,
and 韩康
自动化学报
2019
[Abs]
[doi]
[pdf]
针对具有时变有限且不可预知计算资源的控制系统,提出了一种充分利用可用计算资源的预测控制策略和相应的控制器设计方法。该策略在控制系统可用计算资源充足时计算多步前向预测控制量,进而使用合适预测控制量在控制器因缺少计算资源无法运行时闭合 系统,达到了在不要求额外计算资源前提下提升控制系统性能的效果,利用改进的模型预测控制方法设计了相应的控制器,并分别使用纯数值和Matlab/LabVIEW联合仿真算例对所提出的方法进行了验证。
-
Denoising of Surface Electromyogram Based on Complementary Ensemble Empirical Mode Decomposition and Improved Interval Thresholding
Xu-Gang Xi,
Yan Zhang,
Yun-Bo Zhao ,
Qingshan She,
and Zhizeng Luo
Review of Scientific Instruments
2019
[Abs]
[doi]
[pdf]
Surface electromyogram (sEMG) signals are physiological signals that are widely applied in certain fields. However, sEMG signals are frequently corrupted by noise, which can lead to catastrophic consequences. A novel scheme based on complementary ensemble empirical mode decomposition (CEEMD), improved interval thresholding (IT), and component correlation analysis is developed in this study to reduce noise contamination. To solve the problem of losing desired information from sEMG, an sEMG signal is first decomposed using CEEMD to obtain intrinsic mode functions (IMFs). Subsequently, IMFs are selected via component correlation analysis, which is a measure used to select relevant modes. Thus, each selected IMF is modified through improved IT. Finally, the sEMG signal is reconstructed using the processed and residual IMFs. Root-mean-square error (RMSE) and signal-to-noise ratio (SNR) are introduced as evaluation criteria for the sEMG signal from the standard database. With SNR varying from 1 dB to 25 dB, the...
-
Surface Electromyography-Based Daily Activity Recognition Using Wavelet Coherence Coefficient and Support Vector Machine
Xu-Gang Xi,
Chen Yang,
Jiahao Shi,
Zhizeng Luo,
and Yun-Bo Zhao
Neural Processing Letters
2019
[Abs]
[doi]
[pdf]
Daily activity monitoring plays an important role among frail or elderly people and has caught attention. Surface electromyography (sEMG) can extract the feature of activity, but it is not stable because of electrode displacement, postural changes, and individual- dependent features, such as the condition of muscles, subcutaneous fat, and skin surface. To effectively extract the feature of sEMG signal, we proposed a new method of feature extraction based on coherence analysis. The sEMG signals were recorded from gastrocne- mius, tibialis anterior, rectus femoris, and semitendinosus. After de-noising, sEMG signals were decomposed into 32-scale by wavelet transformation, and their wavelet coefficients were employed to calculate wavelet coherence coefficients (WCC). We employed T test to find out if the coherence between sEMG signals was statistically different among six activi- ties. The 32nd scale WCC of RF–ST and ST–TA as eigenvector was entered into the sup- port vector machine (SVM). The six activities, namely, standing, walking, running, stair- ascending, stair-descending, and falling, were successfully identified by the WCC feature with the SVM classifier.
-
A Brief Tutorial and Survey on Markovian Jump Systems: Stability and Control
Ping Zhao,
Yu Kang,
and Yun-Bo Zhao
IEEE Syst. Man Cybern. Mag.
2019
[Abs]
[doi]
[pdf]
A brief tutorial and survey for the stability analysis and control approaches for Markovian jump systems is provided. Various stability notions for Markovian jump systems are first defined, and several commonly used control approaches to such systems are then presented. These discussions consist of both the fundamental concepts and definitions, and the-state-of-the-art of the recent developments in the literature. Such a combination gives a general picture of the field.
-
Classification-Based Control for Wireless Networked Control Systems with Lossy Multipacket Transmission
Yun-Bo Zhao ,
Jiang-Tao He,
Qiao-Hui Zhu,
Tao Huang,
and Shi Ming Yu
IEEJ Transactions on Electrical and Electronic Engineering
2019
[Abs]
[doi]
[pdf]
A classification-based control approach is proposed for wireless networked control systems with lossy multi-packet transmission. This approach takes advantage of a state reconstruction process to deal with the distinct feature of partial failure of data transmission caused by multi-packet transmission, and then classifies the difference of the latest received system states and and reconstructed ones to design a classification-based controller. The closed-loop stability of the system is proven using the switched systems theory. By considering more communication characteristics of multi-packet transmission, the proposed approach is shown to give rise to a better system performance by a numerical example.
-
多径路由网络化控制系统的路径调度与控制器协同设计
赵云波,
姚俊毅,
and 倪洪杰
系统科学与数学
2019
[Abs]
[pdf]
研究了带有多径通信路由的网络化控制系统的通信路径调度和控制器的协同设计问题。通过将不同通信路径切换及带来的时延变化建模为系统模态的切换,得到了所研究系统的切换系统模型。给出了使得闭环系统指数稳定的通信路径调度所需满足的条件,并提出了满足系统稳定和网络负载均衡的闭环通信路径调度方案和控制器设计方法。数值仿真算例验证了算法的优越性和有效性。
-
A Novel Location Strategy for Minimizing Monitors in Vehicle Emission Remote Sensing System
Yu Kang,
Zerui Li,
Yun-Bo Zhao ,
Jiahu Qin,
and Weiguo Song
IEEE Transactions on Systems, Man, and Cybernetics: Systems
2018
[Abs]
[doi]
[pdf]
The vehicle emission remote sensing system is one promising solution to monitor the emissions of on-road vehicles that contribute to the air pollution in urban areas. To implement such a system an effective location strategy to place the moni- tors is yet to be designed. To this purpose we formulate a novel location problem where the minimum subset of roads on which traffic emission monitors are located is to be found only using the topological structure and some other available information of the traffic network. We solve this problem by transforming it into a graph-theoretic problem and considering more character- istics such as the traffic regulations and limits. After modeling the real-world traffic network as a digraph, a two-step algo- rithm is developed. The first step is to find all directed circuits to establish hypergraph-based set of directed circuits using the depth first searching strategy. In the second step, an approxima- tion algorithm is designed to find the greedy transversal which is a subset of roads to place vehicle emission monitors in order to cover all the traffic circuits. The performance of the loca- tion strategy is validated by both theoretical developments and illustrative examples.
-
Discretization-Based Stabilization for a Class of Switched Linear Systems with Communication Delays
Pengfei Li,
Yu Kang,
Yun-Bo Zhao ,
Jiahu Qin,
and Weiguo Song
ISA Transactions
2018
[Abs]
[doi]
[pdf]
The stabilization problem for a class of switched linear systems is investigated in the network environment. Both the synchronous and asynchronous cases are considered according to the availability of the current activated system mode to the actuator. The random communication delay is assumed to be Markovian, resulting in a sampled-data synchronous or asynchronous switched system with Markovian delay as the closed-loop system. We extend the discretization approach to deal with such sampled-data system through exploring the stability conditions of the corresponding discrete-time system. For the asynchronous case, we formulate the closed-loop system as a hybrid system with the switching between its subsystems governed by a switching signal and a Markov chain. By studying the switching number and one-step reachable mode set of the constructed vector- valued switching signal, the exponential mean-square stability (EMSS) conditions and the corresponding mode- dependent controller are obtained with a more general constraint on the designed switching signal. These results are finally verified by two illustrated numerical examples.
-
Self-Tuning Asynchronous Filter for Linear Gaussian System and Applications
Wenjun Lv,
Yu Kang,
and Yun-Bo Zhao
IEEE/CAA Journal of Automatica Sinica
2018
[Abs]
[doi]
[pdf]
In this paper, the filtering problem for linear Gaussian system is considered. We will propose a self-tuning asyn- chronous filter subject to measurement-lossy situation where the measurements are available at equal sampling intervals, namely, the process and measurement equations are asynchronous at every time but synchronous every several times. What is more, considering the variation of noise statistics, a regular called noise variance estimator is introduced to adjust filter’s coefficients adaptively. The case studies of wheeled robot navigation system and air quality evaluation system will show the practicability in engineering and some characteristics.
-
Bipartite Consensus of Discrete-Time Double-Integrator Multi-Agent Systems with Measurement Noise
Cui-Qin Ma,
Weiwei Zhao,
and Yun-Bo Zhao
Journal of Systems Science and Complexity
2018
[Abs]
[doi]
[pdf]
The effects of measurement noise are investigated in the context of bipartite consensus of multi-agent systems. In the system setting, discrete-time double-integrator dynamics are assumed for the agent, and measurement noise is present for the agent receiving the state information from its neighbors. Time-varying stochastic bipartite consensus protocols are designed in order to lessen the harmful effects of the noise. Consequently, the state transition matrix of the closed-loop system is analyzed, and sufficient and necessary conditions for the proposed protocol to be a mean square bipartite consensus protocol are given with the help of linear transformation and algebraic graph theory. It is proven that the signed digraph to be structurally balanced and having a spanning tree are the weakest communication assumptions for ensuring bipartite consensus. In particular, the proposed protocol is a mean square bipartite average consensus one if the signed digraph is also weight balanced.
-
Bipartite Linear χ-Consensus of Double-Integrator Multi-Agent Systems With Measurement Noise
Cui-Qin Ma,
Weiwei Zhao,
and Yun-Bo Zhao
Asian Journal of Control
2018
[Abs]
[doi]
[pdf]
The bipartite consensus problem is investigated for double-integrator multi-agent systems in the presence of measurement noise. A distributed protocol with time-varying consensus gain is proposed. By using...
-
Event-Triggered Bipartite Consensus of Single-Integrator Multi-Agent Systems with Measurement Noise
Cui-Qin Ma,
Yun-Bo Zhao ,
and Wei-Guo Sun
Journal of Control Science and Engineering
2018
[Abs]
[doi]
[pdf]
Event-triggered bipartite consensus of single-integrator multi-agent systems is investigated in the presence of measurement noise. A time-varying gain function is proposed in the event-triggered bipartite consensus protocol to reduce the negative effects of the noise corrupted information processed by the agents. Using the state transition matrix, Itô formula, and the algebraic graph theory, necessary and sufficient conditions are given for the proposed protocol to yield mean square bipartite consensus. We find that the weakest communication requirement to ensure the mean square bipartite consensus under event-triggered protocol is that the signed digraph is structurally balanced and contains a spanning tree. Numerical examples validated the theoretical findings where the system shows no Zeno behavior.
-
Prediction-Based Approach to Output Consensus of Heterogeneous Multi-Agent Systems with Delays
Chong Tan,
Xiao Yin,
Guo-Ping Liu,
Jinjie Huang,
and Yun-Bo Zhao
IET Control Theory & Applications
2018
[Abs]
[doi]
[pdf]
The output consensus of multi-agent systems is investigated, where constant communication delay is present and the dynamics of the agents are heterogeneous. Based on the networked predictive control scheme, the distributed consensus protocol with dynamic output feedback controller is designed, and the sufficient conditions of the output consensus are obtained. Numerical examples illustrate the effectiveness of the proposed method.
-
Stochastic Stabilisation of Wireless Networked Control Systems with Lossy Multi-Packet Transmission
Yun-Bo Zhao ,
Tao Huang,
Yu Kang,
and Xu-Gang Xi
IET Control Theory & Applications
2018
[Abs]
[doi]
[pdf]
The stochastic stabilisation of networked control systems is investigated with a special focus on the lossy multi-packet transmission in the wireless communication context. The resulting partially available system states due to multi-packet transmission are firstly reconstructed at the controller, and the sufficient conditions for stochastic stability are then given for the closed-loop system, which finally leads to a controller design method with explicit consideration of multi-packet transmission. The proposed theoretical results are verified by both numerical and TrueTime-based examples.
-
A Networked Remote Sensing System for On-Road Vehicle Emission Monitoring
Yu Kang,
Yan Ding,
Zerui Li,
Yang Cao,
and Yun-Bo Zhao
Sci China Inf. Sci
2017
[Abs]
[doi]
[pdf]
Vehicle emissions are a major source of urban air pollution, and therefore a real-time monitoring system can be very useful in analyzing such emission and consequently assisting the policy making process. In this work we discuss the principle and structure of three different types of remote sensing detectors, and also the key techniques to establish a networked remote sensing monitoring system. We finally conclude this paper with data analysis from some preliminary experiments.
-
Bipartite Consensus of Integrator Multi-Agent Systems with Measurement Noise
Cui-Qin Ma,
Zheng-Yan Qin,
and Yun-Bo Zhao
IET Control Theory & Applications
2017
[Abs]
[doi]
[pdf]
The bipartite consensus problem for integrator multi-agent systems over signed fixed digraphs is investigated in the presence of measurement noise. A time-varying consensus gain is introduced and then a stochastic type protocol is proposed, whose performance is analysed using the state transition matrix of the closed-loop system. Necessary and sufficient conditions for ensuring a mean square bipartite consensus protocol are obtained in the presence of noise. Furthermore, in the absence of noise it is shown that these conditions are also necessary and sufficient for ensuring the bipartite consensus except for the quadratic integrability of the consensus gain. It is found that the signed digraph being structurally balanced and having a spanning tree are the weakest assumptions on connectivity for achieving bipartite consensus regardless of the measurement noise. In particular, if the signed digraph is structurally unbalanced, then under some mild conditions, the states of the closed- loop system converge to zero in mean square, regardless of the initial states.
-
Leader–Follower \∞Consensus of Linear Multi-Agent Systems with Aperiodic Sampling and Switching Connected Topologies
Dan Zhang,
Zhenhua Xu,
Qing-Guo Wang,
and Yun-Bo Zhao
ISA Transactions
2017
[Abs]
[doi]
[pdf]
This paper is concerned with the distributed H\ınfty consensus of leader–follower multi-agent systems with aperiodic sampling interval and switching topologies. Under the assumption that the sampling period takes values from a given set, a new discrete-time model is proposed for the tracking error system. For the multi-agent systems with time-varying sampling period, switching topologies and external dis- turbance, the considered tracking problem is converted to a robust H\ınfty control problem. With help of the Lyapunov stability theory, a sufficient condition for the existence of mode-dependent controller is es- tablished and it guarantees the exponential stability of tracking error system and a prescribed H\ınfty dis- turbance attenuation level. The influence of sampling period on the overall control performance is also discussed. Two simulation examples are given to show the effectiveness of the proposed control algo- rithm.
Conference Articles
-
Self-Triggered Model Predictive Control for Perturbed Nonlinear Systems: An Iterative Implementation
Tao Wang,
Pengfei Li,
Yu Kang,
and Yun-Bo Zhao
In 2021 60th IEEE Conference on Decision and Control (CDC)
2021
[Abs]
[doi]
[pdf]
In this paper, a novel iterative self-triggered model predictive control strategy is proposed for continuous-time nonlinear systems with external disturbance. For this strategy, the triggering instants are determined by iteratively using the self-triggered mechanism. To be specific, the triggering mechanism, on the one hand, determines the next sampling instants of the sensor by a prespecified condition, and, on the other hand, decides whether or not to treat the current sampling instant as the triggering instant. Without continuous monitoring of the state, the sensing cost of the sensor can be alleviated. The utilization of the sampling states after the triggering instant leads to a larger triggering interval, and the computational load of the controller can thus be reduced. The effectiveness of the proposed strategy is validated by a numerical example.
-
Event-Triggered Adaptive Horizon Model Predictive Control for Perturbed Nonlinear Systems
Pengfei Li,
Tao Wang,
Yu Kang,
and Yun-Bo Zhao
In 2020 59th IEEE Conference on Decision and Control (CDC)
2020
[Abs]
[doi]
[pdf]
This paper proposes a new event-triggered adaptive horizon model predictive control (MPC) for discrete-time nonlinear systems with additive disturbance. With the eventtriggered control scheme, the MPC is solved only at triggering instant and the event is triggered if the difference between the actual state and the predicted state exceeds the triggering threshold. The triggering threshold depends on the prediction horizon and becomes larger as the state approaches the terminal constraint set. Therefore, larger triggering intervals can then be obtained. Finally, a numerical example shows the effectiveness of the proposed scheme.
-
Synthesis of Wireless Networked Control System Based on Round-trip Delay Online Estimation
Liang Lu,
Qipeng Liang,
Qiaohui Zhu,
and Yun-Bo Zhao
In 2020 Chinese Automation Congress (CAC)
2020
[Abs]
[doi]
[pdf]
A control design approach with the integration of online delay estimation is proposed for wireless networked control systems (WNCSs) with unknown round-trip delay, which improves control performance in a practically feasible way. We introduce a delay probability estimation unit to obtain the delay characteristics by estimating the delay when the control system is running. We also present a piecewise approximation control strategy to take advantage of the estimation. Furthermore, the control gain is synthesized with stability guarantee. The conditions to ensure the stochastic stability of the closed-loop system are given, and the effectiveness of the proposed approach is verified numerically.
-
Detection of Distracted Driving Based on Multi-Granularity and Middle-Level Features
Min Tang,
Fang Wu,
Li-Li Zhao,
Qi-Peng Liang,
Jian-Wu Lin,
and Yun-Bo Zhao
In 2020 Chinese Automation Congress (CAC)
2020
[Abs]
[doi]
[pdf]
A so-called MGMN (Multiple-GranularityMiddle Network) algorithm is proposed to improve the detection accuracy of distracted driving, based on multigranularity features and middle-level features. The algorithm is derived from the ResNet50 neural network and is the first time to use multi-granularity features and mid-level features of images in the field of distracted driving detection. The multigranularity feature extraction module consists of three branches: the global branch to learn the global features without local information, the second branch to divide the image level into two parts and later to learn the local features of the upper and lower parts, and the third branch to divide the image level into three parts, and later to learn the local features of the upper, middle and lower parts. By extracting the features of the middle layer of the image, the feature extraction of the algorithm is enriched. While the multi-granularity features are individually input to the cross-entropy loss function, the multi-granularity features of the image and the middle-level features are combined and input into the cross-entropy loss function. The proposed algorithm has an accuracy of 99.8% on the dataset "Districted-DriverDetection" published by State Farm Company, which is 1.5% to 3% higher than existing algorithms, and an improved accuracy of 98.7% on the dataset "AUC-Districted-Driver-Detection".
-
Autonomous Boundary of Human-Machine Collaboration System Based on Reinforcement Learning
Qianqian Zhang,
Yun-Bo Zhao ,
and Yu Kang
In 2020 Australian and New Zealand Control Conference (ANZCC)
2020
[Abs]
[doi]
[pdf]
This paper provides a human-machine collaborative control framework, including artificial intelligence decision systems, human-level control, arbiter judgment, and learning of autonomous boundary, so that human suggestions are incorporated into the training process of decisions, assisting agents to learn quickly control decision tasks. Based on the model-free deep reinforcement learning algorithm HITL-AC, the human feedback (reward or punishment) is connected with the reward of the agent, so that the agent continuously tries to find a better boundary during the system’s operation, avoiding defects of pre-fixed boundary. This formulation improves the data efficiency of reinforcement learning and plays a guiding role in seeking human intervention when the agent is in an uncertain environmental state during the test use phase. The fourth section of the paper gives a training demonstration of the bipedal walker. The experimental results show that human intervention can accelerate the process of agent reinforcement learning during the training phase, and seek human help when guiding the dangerous state of the agent during the test phase. This is beneficial for solving real-world problems, further proving the feasibility and effectiveness of the proposed framework and method.
-
Channel-Aware Scheduling for Multiple Control Systems with Packet-Based Control over Collision Channels
Pengfei Li,
Yu Kang,
Yun-Bo Zhao ,
and Xiaokang Pan
In 2019 American Control Conference (ACC)
2019
[Abs]
[doi]
[pdf]
We consider a wireless control architecture with multiple control systems communicating over two shared col- lision channels. Each sensor accesses the channel randomly and a scheduler at the controller side decides which controller is permitted to access the channel. We design a packet-based model predictive controller and obtain the packet transmission success probability demands of stability. The channel-aware transmission strategy of each sensor is studied in the non- cooperative game theory framework. We also characterize the Nash equilibrium and design a decentralized channel access mechanism to achieve the Nash equilibrium. The effectiveness of our results is demonstrated by a numerical simulation.
-
State Estimation with Multi-Packet Transmission Over the Wireless Network
Jiang-Tao He,
and Yun-Bo Zhao
In Chinese Control Conference
2018
[Abs]
[doi]
[pdf]
In wireless control, the measurement of a system may be divided into multiple partial observations for transmission purpose, known as ”multi-packet transmission”. The state estimation for the discrete linear time-invariant system with the multi- packet transmission is considered. We focus on what the filter has received during each time step. For the randomness of the received packets, the classical Kalman filter is revised to the time-varying Kalman filter. With the concept of combination and the supposed delivery rate for each packet, we analyze the stability of the filter in the sense of expectation. To deal with the combination explosion problem, alternative conditions on delivery rates is provided.
-
Packet-Based Model Predictive Control for Networked Control Systems With Random Packet Losses
Pengfei Li,
Yu Kang,
Yun-Bo Zhao ,
and Zheng Yuan
In IEEE Conference on Decision and Control
2018
[Abs]
[doi]
[pdf]
In this paper, the stability for a class of nonlinear networked control systems with a model predictive controller (MPC) is investigated. Both the sensor-to-controller channel and the controller-to-actuator channel suffer from random packet losses. By constructing a novel cost function, and studying its deviation from the original MPC cost function, we establish the stochastic stability for the closed-loop system. To guarantee the stability, the relationship between the prediction horizon and the packet loss probabilities of two channels is also discussed. Finally, the effectiveness of our results is demonstrated by a numerical example.
-
多径路由网络化控制系统的建模和稳定性分析
赵云波,
and 姚俊毅
In 中国控制会议
2018
[Abs]
[pdf]
研究了基于多径路由的网络化控制系统,对多径路由中存在的时延和丢包进行建模,并对由于长时延和多路径 丢包所导致的控制信息的乱序进行分析,并将其建立成有限状态的Markov链的形式。利用基于包的控制方法针对不同 的执行器端时延的情况设计控制器。最后数值仿真验证了算法的优越性和有效性。
-
Dynamic Event-Triggered Control for Networked Switched Linear Systems
Pengfei Li,
Yu Kang,
Yun-Bo Zhao ,
and Jian Zhou
In Chinese Control Conference
2017
[Abs]
[doi]
[pdf]
A class of discrete-time networked switched control systems are investigated with event-triggered control. The closed- loop system is formulated as switched linear systems with time-varying delays, based on which the exponential stability con- ditions are obtained under the time delay system framework. The co-design conditions of the control gain and the triggering parameters are proposed. Finally, a comparison between the static event-triggered mechanism and the dynamic one is illustrated by a numerical example.
-
A Novel Static PET Image Reconstruction Method
Hongxia Wang,
and Yun-Bo Zhao
In Chinese Automation Congress
2017
[Abs]
[doi]
[pdf]
In this paper, we present a novel image recon- struction algorithm for positron emission tomography(PET). Almost all of existing reconstruction approaches assume that the measurement model for PET is linear equation with Gaussian white noise or energy-bounded noise, which only approximates the emission and detection of PET very roughly. In fact, the real situation is much more complicated than the one mentioned above and there must be something that is not be involved in the aforementioned model. Hence, in this paper, we establish a more general and vivid measurement model via involving an unknown input, and propose a reconstruction method based on the optimal filtering for the stochastic system with unknown input. The approach reconstructs the PET image effectively and its performance is evaluated with the computer-synthesized cardiac-phantom.
-
Analytic Solution to Indefinite Linear Quadratic Regulator for Stochastic Systems
Hongxia Wang,
and Yun-Bo Zhao
In Chinese Control Conference
2017
[Abs]
[doi]
[pdf]
This paper aims to deal with the indefinite linear quadratic regulator(ILQR) for stochastic systems. It provides both the analytic solution to the ILQR and the sufficient and necessary condition under which the ILQR is solvable. Different from the existed literature, we obtain the results in a novel way. In order to obtain a tighter necessary condition, we investigate the solution structure of a two-point boundary value problem for a stochastic differential equations directly but involve no complicated probabilistic derivation. Consider that there are close relationships between the linear game problem and H\ınfty control and ILQR, the idea in the paper can also be extended to solve these problems.
-
Categorizing Attractor-Effective Canalyzing Functions in Boolean Networks
Yun-Bo Zhao ,
Hui Dong,
and Hongjie Ni
In IFAC-PapersOnLine
2017
[Abs]
[doi]
[pdf]
Canalyzing Boolean functions have shown their popularity in various biological networks and established themselves to be biologically meaningful at the system level, marking their importance in the analysis of stability and robustness of such complex systems. Based on a matrix representation of Boolean networks due to the recently developed tool called semi- tensor product, we categorize canalyzing functions in terms of their capabilities of affecting the number of attractors in the Boolean network, which is one key index for the stability and robustness of Boolean networks. We show that there exist only three categories of attractor- effective canalyzing functions for any network size larger than 1, while the number of all the interested canalyzing functions is proportional to the square of the network size. We also give the explicit expression of the mean number of attractors with any length for Boolean networks with a single canalyzing function. Compared with Boolean networks without any canalyzing functions, we are able to show quantitatively how canalyzing functions can affect the mean number and length of attractors in Boolean networks for the first time.
-
Scheduling and Control Co-Design for Control Systems under Computational Constraints
Yun-Bo Zhao ,
Hui Dong,
and Hongjie Ni
In IFAC-PapersOnLine
2017
[Abs]
[doi]
[pdf]
A prediction-based approach is proposed for control systems with limited and time- varying computational resources. The limited and time-varying computational resources can make the control system run in an open-loop fashion which may severely degrade the system performance or even destabilize the system. This issue is dealt with by producing more than one forward control predictions when abundant computational resources are available, and then using these forward control predictions to close the system when the computational resources are insufficient to calculate real-time control signal. This achievement is made without additional requirement for the computational resources and can be regarded as a useful completion of the scheduling algorithms. With a controller designed using a modified model predictive control method, the effectiveness of the proposed approach is successfully illustrated by a numerical example.
Books
-
Packet-Based Control for Networked Control Systems
Yun-Bo Zhao ,
Guo-Ping Liu,
Yu Kang,
and Li Yu
Springer Nature Singapore Pte Ltd.
2018
[Abs]
[doi]
[pdf]
Networked control systems (NCSs) are control systems whose control links are closed via some form of communication networks. It has become a useful control system model in recent years due to the fast development of the embedded com- putational devices and the communication technology. These developments have made it possible that a large number of sensors, actuators and controllers can be interconnected over the communication network to interact with the physical environment. This remote and distributed control system structure is the basis of a great many of future applications in information technology, including Internet of Things, cyber-physical systems, smart home. NCSs can contain a large number of control devices interconnected, and data is exchanged through communication networks which inevitably introduces com- munication constraints to the control system, e.g. network-induced delay, data packet dropout, data packet disorder, data rate constraint. These communication constraints in NCSs present great challenges for conventional control theory. The study of NCSs therefore requires multi-field knowledge, and consequently the integration of control, communication and computations, i.e. the “co-design” approach. In this book, we report a class of co-design approach to NCSs—the “packet-based control” approach—which is achieved by taking advantage of the packet-based transmission of the communication network in NCSs, one primary feature distinct from conventional control systems. For completeness, an introductory chapter is first included which provides a brief tutorial of NCSs, and then the remainder of the book is organized into three parts, covering the design, analysis and extension of the packet-based control approach, respectively. These studies have shown that the packet-based control approach is both unified and flexible: on the one hand, the approach can stand on its own as a novel class of design and analysis methods different from existing ones; on the other, control methods can also be fitted into the packet-based control approach for a better system performance. A unique co-design framework, i.e. packet-based net- worked control systems, is thus finally constructed. We hope the reader will find this book useful for their understanding of and research on networked control systems.isting
-
Stability Analysis of Markovian Jump Systems
Yu Kang,
Yun-Bo Zhao ,
and Ping Zhao
Springer Nature Singapore Pte Ltd.
2017
[Abs]
[pdf]
This book focuses on the stability analysis of Markovian jump systems (MJSs) with various settings and discusses its applications in several different areas. It also presents general definitions of the necessary concepts and an overview of the recent developments in MJSs. Further, it addresses the general robust problem of Markovian jump linear systems (MJLSs), the asynchronous stability of a class of nonlinear systems, the robust adaptive control scheme for a class of nonlinear uncertain MJSs, the practical stability of MJSs and its applications as a modelling tool for networked control systems, Markovian-based control for wheeled mobile manipulators and the jump-linear-quadratic (JLQ) problem of a class of continuous-time MJLSs. It is a valuable resource for researchers and graduate students in the field of control theory and engineering.
patent
-
基于TCP协议的NS3与MATLAB集成的联合仿真接口方法
赵云波,
高晓智,
苏艺帆,
and 韩康
2023
[Abs]
[pdf]
基于人脸识别与行人重识别的特定目标跟踪方法,首先训练基于特征融合 与三重损失函数的行人重识别神经网络,建立追踪目标人脸库,人脸识别模块 提取人脸库的人脸特征向量;然后检测监控画面中的行人,人脸识别模块提取 监控画面中行人人脸特征,与人脸库特征向量比对相似度,人脸识别成功则保 存由行人重识别模型得到的行人特征至行人库。人脸识别失败则进行行人重识 别,比对行人特征与行人特征库的相似度。行人重识别成功则保存相似度高的 行人特征至行人库,行人重识别失败则利用上下帧的时空相关性确定行人的身 份。最终实现在监控中对特定目标实时、有效的跟踪。
-
一种基于NS3和MATLAB的网络化控制系统协同仿真方法
赵云波,
高晓智,
苏艺帆,
and 韩康
2023
[Abs]
[pdf]
一种基于NS3和MATLAB的网络化控制系统协同仿真平台,首先设计网络化 控制系统协同仿真平台总体方案,包括设计仿真平台系统架构,确定网络化控 制系统协同仿真平台组成模块以及确定协同仿真平台数据交换与传递方案,在 linux操作系统中搭建两种仿真软件的运行环境, 之后设计网络化控制系统协同 仿真平台时间同步方案,协同仿真系统是一种对实时性和时序严格要求的仿真 系统,需要通过同步推进两仿真器执行,因此设计了三种协同仿真时间同步方 案,并选择其中两种予以实现,并改进同步交互模型的设计,接下来对NS3各模 块程序设计,并设计NS3仿真脚本,最后进行MATLAB/Simulink各模块程序的设 计,包括MATLAB仿真驱动模块、Simulink控制系统模型、MATLAB客户端组件 与MATLAB用户交互界面几个模块的设计。
-
一种基于贝叶斯推断的动态数据包打包方法
赵云波,
许德衡,
and 唐敏
2022
[Abs]
[pdf]
本发明涉及一种基于贝叶斯推断的动态数据包打包方法,本发明针对使用共享网络进行通信的网络化控制系统中实时优化网络资源使用的问题,解决了网络化控制系统中优化网络资源是无法得到实际网络时延特征的问题。首先,对网络时延进行建模,并对其分布模型中的参数选取先验分布。其次,利用控制系统自身收集的最近历史时延数据,根据贝叶斯推断理论设计了模型的在线学习方法,得到了参数的后验分布。然后,分别从参数的后验分布中采样得到实时的参数值并带入更新时延分布模型。最后,从实时的时延分布模型中计算得到时延上界估计值,并依此来指导控制系统来设计数据包的长度,达到实时优化网络资源使用的目标。
-
一种基于多路径切换的无限制DoS攻击防护方法
赵云波,
and 朱巧慧
2022
[Abs]
[pdf]
基于多路径切换的无限制DoS攻击防护方法,首先根据网络丢包率情况和系统模型确定系统可以容忍的最大丢包数,设计DoS攻击检测模块,从而得到多切换路径条件;然后执行器端记录当前传感器到控制器的连续丢包数并发送给传感器,若当前连续丢包数满足路径切换条件,则传感器和控制器切换路径传输数据,若当前连续丢包数没有满足路径切换条件,则继续检测。多路径切换防护方法通过不断检测和切换路径,可以解决无限制DoS攻击造成的连续丢包现象,从而使得系统一直保持稳定。
-
一种基于IEEE 802.15.4协议的无线网络化控制系统的调度算法
赵云波,
何江涛,
唐敏,
倪洪杰,
and 余世明
2021
[Abs]
[pdf]
一种基于IEEE 802.15.4协议的无线网络化控制系统的调度算法, 包括:步 骤1:计算控制增益序列 K ;步骤2:计算更新截止期限 k i 1 ;步骤3:制定请求采 样协议;步骤4:设计双GTS网络调度算法;步骤5:设计混合网络调度算法。本 发明将一组与时延相关的控制增益引入到传统的自触发控制来计算采样间隔, 降低了控制器的保守性;利用IEEE 802.15.4协议的信标特性制定请求采样的机 制,减轻了能量受限的传感器的负担;根据仅在紧急情况下才使用可靠通信资 源的思想设计网络调度算法。该发明在满足一定的控制性能要求的前提下,能 够较大程度地减轻控制系统对可靠通信资源的依赖性。
-
一种针对多传感网络化控制系统的数据包丢失的补偿方法
赵云波,
韩康,
and 黄涛
2021
[Abs]
[pdf]
一种针对多传感网络化控制系统的数据包丢失的补偿方法,包括:步骤1)在控制系统的初始状态,控制器切换成本发明的系统模型;步骤2)控制系统中存在的多个传感器分别采集到控制系统的一个状态信息,这些状态信息被分别单独地发送到控制器端;步骤3)控制器在接收到传感器发来的这些信息之后,首先判断是否发生了部分数据包的丢失现象,如果发生了部分数据包的丢失现象,为了保持控制系统的稳定性,则对控制系统的丢失的数据根据步骤一中切换的系统模型进行预测;步骤4)控制器将预测的传感器信号和传感器实际发送过来的信号进行整合组成新的状态向量,进行控制量的计算,并把组成的状态向量保存到本地,然后将计算出来的控制量发送到执行器。
-
一种多径通信网络化控制系统的路径调度与控制器协同设计方法
赵云波,
and 姚俊毅
2020
[Abs]
[pdf]
一种基于多径路由的网络化控制系统的路径调度以及控制器设计方法,包括如下步骤:对网络化控制系统建立状态空间模型,考虑路径切换导致的时变时延模型,建立基于时延的切换系统模型;根据切换子系统模型,设计并通过锥补线性化算法求解子系统的控制增益。给出路径调度方案的设计并计算网络的路径代价值;结合子系统的路径代价值以及控制增益,利用分支定界法对调度方案具体参数进行设计。
-
一种适用于网络化控制系统的主动时延补偿方法
赵云波,
韩康,
and 黄涛
2020
[Abs]
[pdf]
一种针对多传感器网络化控制系统的主动时延补偿方法,包括如下步骤:1)多个传感器的数据和执行器实际使用的控制信号通过单独的通讯信道发送到控制器;2)控制器接收并判断采集到的控制器信号是否缺失,如果不缺失直接根据控制算法计算控制信号,如果缺失部分传感器的信号,则先进行系统重建;3)控制器根据信号的完整性与否做出不同的控制序列,然后把控制信号打包成一个数据包发送出去;4)控制信号选择器在这些控制序列中选择一个最优的控制信号作用于执行器,并把选择的控制信号通过通讯信道发送到控制器。
项目人员
赵云波 何江涛 卢帅领 姚俊毅 朱巧慧 梁启鹏 潘晓康 袁征 许德衡 郝小梅 闫文晓 韩康 顾慧卿 黄涛
项目合作
-
Jongrae Kim 教授, University of Leeds, UK
-
刘国平 教授, 南方科技大学工学院
-
席旭刚 教授, 杭州电子科技大学自动化学院
-
康宇 教授, 中国科学技术大学自动化系
-
李鹏飞 特任副研究员, 中国科学技术大学自动化系
-
马翠芹 教授, 曲阜师范大学数学科学学院